用闭环PID自动调谐块对异步机器的磁场定向控制器进行调谐
这个例子展示了如何使用闭环PID自动调谐块在一个异步机器(ASM)的场定向控制(FOC)在仅仅一个仿真。
磁场定向控制简介
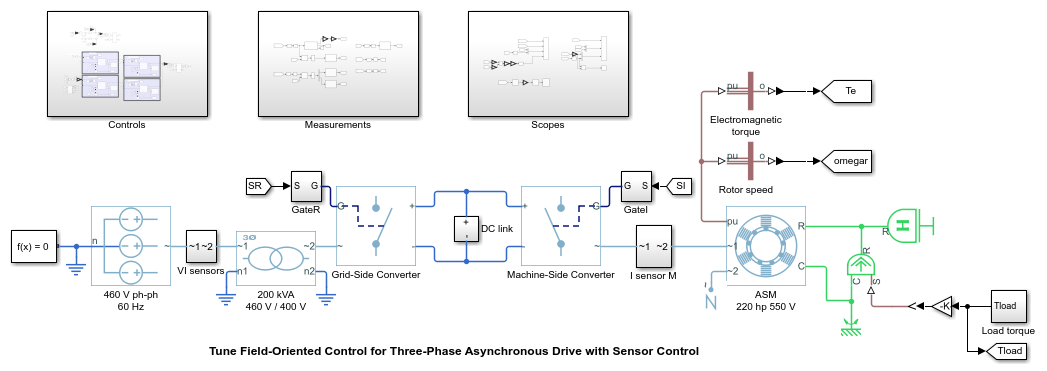
在本例中,异步机(ASM)的磁场定向控制(FOC)在Simulink®中使用Simscape建模™ 与电有关的™ 组件。该模型基于Simscape示例金宝app带有传感器控制的三相异步驱动(西姆斯开普电气).
mdl =“scdfocasmPIDTuning”;open_system (mdl)
磁场定向控制将三相定子电流作为矢量进行控制。FOC基于投影,将三相时变和速度相关系统转换为两坐标时不变系统。这些变换是Clarke变换、Park变换以及它们各自的逆变换。这些转换在控制子系统中以块的形式实现。

使用FOC控制交流电机的优点包括:
转矩和磁通分别直接控制
精确的瞬态和稳态管理
性能与直流电动机相似
控制子系统包含所有四个PI控制器。外环速度PI控制器调节电机转速。外环磁链PI控制器对定子磁链进行调节。两个内环PI控制器分别控制d轴和q轴电流。外环速度PI控制器的指令直接馈给q轴来控制转矩。ASM的d轴命令是非零的,是外环磁链PI控制器的结果。
现有PI控制器具有以下优点:
速度PI控制器的增益P = 65.47, I = 3134.24。
通量PI控制器的增益P = 52.22, I = 2790.51。
d轴PI控制器的增益P = 1.08, I = 207.58。
q轴PI控制器的增益P = 1.08, I = 210.02。
控制器增益存储在数据存储存储器块中,并在外部提供给每个PID块。当控制器的调谐过程完成时,新的调谐增益被写入数据存储存储器块。此配置允许您在模拟期间实时更新控制器增益。
闭环PID自动调谐块
闭环PID自动调谐块允许您一次调整一个PID控制器。它在设备输入端注入正弦扰动信号,并在闭环实验期间测量设备输出。当实验停止时,模块根据在期望带宽附近的少量点处估计的电厂频率响应计算PID增益。对于该FOC ASM模型,闭环PID自动调谐模块可用于四个PI控制器中的每一个。
这个工作流适用于当你有初始控制器,你想使用闭环PID自动调谐块重新调整。这种方法的好处是:
如果在试验过程中出现意外干扰,现有控制器将拒绝该干扰,以确保安全运行。
现有的控制器通过抑制摄动信号使电厂在其标称工作点附近运行。
当使用闭环PID自动调谐块的仿真和实时应用:
对象必须是渐近稳定的(所有极点都是严格稳定的)或积分的。自动调谐块不适用于不稳定的设备。
已有控制器的反馈回路必须是稳定的。
为了更准确地实时估计植物的频率响应,在实验过程中尽量减少FOC ASM模型中任何干扰的发生。自动调谐器块期望装置输出仅是对注入扰动信号的响应。
由于反馈回路在实验过程中是闭合的,现有的控制器也抑制了注入的扰动信号。使用闭环实验的优点是,控制器使设备在标称运行点附近运行,并保持安全运行。缺点是,如果目标带宽远离当前带宽,则会降低频率响应估计的准确性。
将自动调谐装置与设备和控制器连接
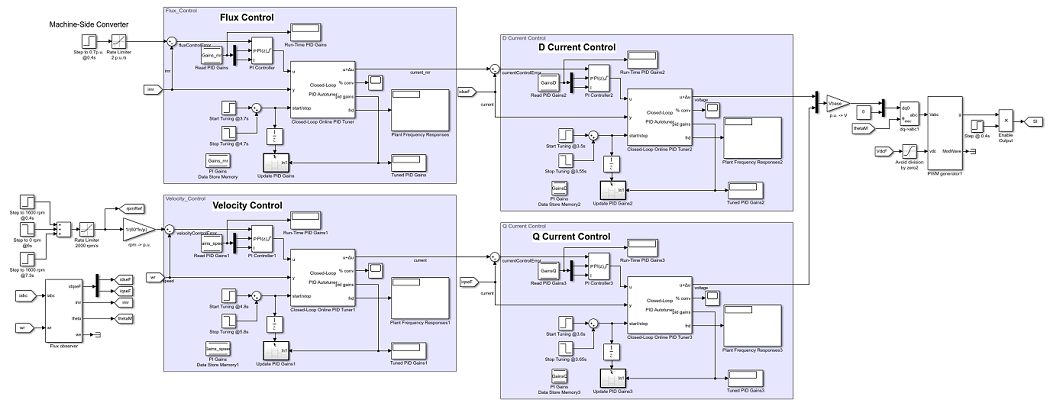
在所有四个PI控制器的PID块和植物之间插入闭环PID自动调谐块,如FOC ASM模型所示。的启动/停止信号启动和停止闭环实验。当未运行任何实验时,闭环PID自动调谐块的行为类似于单位增益块,其中 信号直接传递到
信号直接传递到 .
.
查看带有四个PI控制器的机器侧转换器的原始控制结构。

要修改控制结构,请将闭环PID自动调谐块合并到每个PI控制器。查看机器侧变矩器的改进控制结构。
配置自动调谐块
将闭环PID自动调谐块与设备模型和PID块连接后,对调谐和实验设置进行配置。
上调优选项卡中,有两个主要的调整设置:
目标带宽-确定您希望控制器以多快的速度响应。在本例中,选择
5000用于内环电流控制和控制的rad/sec200Rad /秒为外环控制。
目标相位裕度-确定您希望控制器的健壮程度。在本例中,选择
70内环电流控制和90外环控制的度数。
上实验选项卡中,有三个主要的实验设置:
植物类型-指定对象是渐近稳定还是积分。在本例中,FOC ASM模型是稳定的。
植物标志-指定植物是正号还是负号。如果当设备达到新的稳定状态时,在标称工作点上设备输入的正变化导致设备输出的正变化,则设备符号为正。否则,植物符号为负。如果一个植物是稳定的,植物的符号等于它的直流增益的符号。如果一个植物在进行积分,如果植物产量持续增加(或减少),那么植物符号是正的(或负的)。在这个例子中,FOC ASM模型有一个正的植物符号。
正弦振幅-指定注入正弦波的振幅。在本例中,选择
0.25对于内环控制器和0.01为外环控制器,以确保被试在饱和极限内被正确励磁。激励幅值过大或过小都会产生不准确的频响估计结果。
调整级联反馈回路
因为闭环PID自动调谐块一次只调谐一个PI控制器,四个控制器必须在FOC ASM模型中分别调谐。首先调整内环控制器,然后调整外环控制器。
d轴电流控制器在3.5和3.55秒之间调节。
q轴电流控制器在3.6和3.65秒之间调节。
磁通控制器在3.7和4.7秒之间调谐。
速度控制器在4.8和5.8秒之间调整。
调整每个PI控制器后,控制器增益通过数据存储内存块更新。
在正常模式下模拟自动调谐器块
在这个例子中,FOC ASM模型是在Simulink中构建的。金宝app所有四个控制器都在一个模拟中调谐。此外,还比较了控制器调优前后的速度响应。测试场景包括加速度过程和扭矩负载变化(大小为1 p.u)。
由于电机电力电子控制器的采样时间很短,因此在计算机上模拟FOC ASM模型通常需要几分钟的时间。
Sim (mdl) logsout_autotuning = logsout;保存(“AutotunedSpeed”,“logsout_autotuned”);
下图为整体仿真结果。

上图中的灰色区域显示了调优过程中从3.5秒到5.8秒的电流和速度响应。电流和电机速度的变化非常小。电机转速达到额定转速1600在自动调优过程开始之前。
四个PI控制器被调整为新的增益。
速度PI控制器的增益为P=158.8和I=2110。
磁通PI控制器的增益P = 129.3, I = 1732。
d轴PI控制器的增益P = 1.611, I = 627.6。
q轴PI控制器的增益P = 2.029, I = 829.9。
在自动整定过程之前和之后采用相同的转子速度参考和转矩负载。标称转子转速误差1600使用闭环PID自动调谐块调整控制器前后的rpm。速度误差曲线及时对齐,以并排比较控制器性能。
scdfocasmPIDTuningPlotSpeed
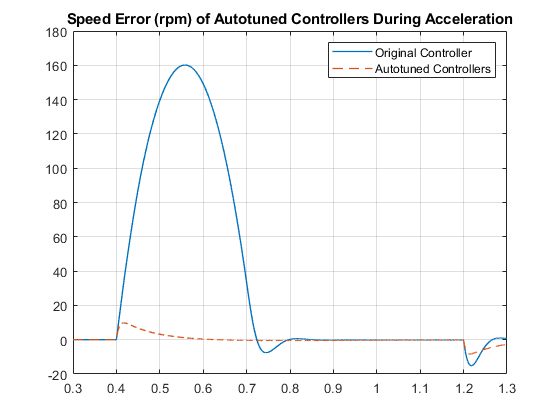

在调整控制器后,异步电动机的速度响应在加速和转矩负载变化期间具有更快的瞬态响应和更小的稳态误差。
bdclose (mdl)
另请参阅
相关的话题
你也可以从以下列表中选择一个网站: