用闭环PID自整定块对磁场定向控制器进行整定
这个例子展示了如何使用闭环PID自动调谐块来调整磁场定向控制(FOC)为一个永磁同步电机(PMSM)在仅仅一个仿真。
面向场控制的介绍
在本例中,永磁同步电机(PMSM)的场向控制(FOC)使用Simscape™Electrical™组件在Simulink®中建模。金宝app
mdl =“scdfocmotorPIDTuning”;open_system (mdl)
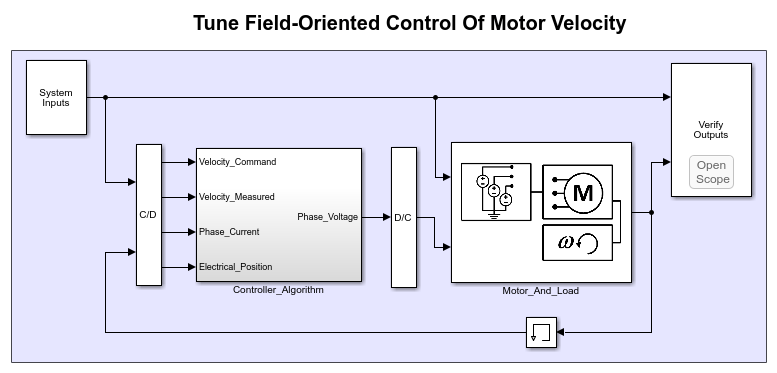
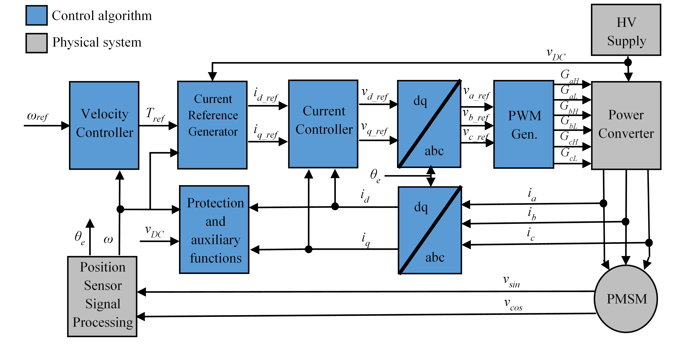
磁场定向控制(FOC)将三相定子电流作为矢量进行控制。FOC是基于投影的,它将一个与时间和速度相关的三相系统转化为一个双坐标时不变系统。这些变换是克拉克变换、帕克变换以及它们各自的逆变换。这些转换在Controller_Algorithm子系统中以块的形式实现。
使用FOC控制交流电机的优点包括:
转矩和磁通分别直接控制
精确的瞬态和稳态管理
性能与直流电动机相似
Controller_Algorithm子系统包含所有三个PI控制器。外环PI控制器调节电机转速。两个内环PI控制器分别控制d轴和q轴电流。外环PI控制器的指令直接馈给q轴来控制转矩。对于PMSM来说,d轴的命令是零,因为这种类型的交流电机的转子磁链是固定的。
现有速度PI控制器的增益P = 0.08655, I = 0.1997。电流PI控制器的增益P = 1, I = 200。
控制器增益存储在数据存储内存块中,并从外部提供给每个PID块。当控制器的调优过程完成时,新的调优增益被写入数据存储内存块。此配置允许您在模拟期间实时更新控制器增益。
闭环PID自动调谐块
闭环PID自动调谐块允许您一次调整一个PID控制器。它在被控对象的输入端注入正弦扰动信号,并在闭环实验中测量被控对象的输出。当实验停止时,该模块根据在期望带宽附近的少量点估计的植物频率响应计算PID增益。对于这个FOC永磁同步电机模型,闭环PID自整定模块可以用于三个PI控制器中的每一个。
这个工作流适用于当你有初始控制器,你想使用闭环PID自动调谐块重新调整。这种方法的好处是:
如果在实验过程中出现意外干扰,现有控制器将予以排除,以保证操作安全。
现有的控制器将通过抑制扰动信号来保持电厂在其标称工作点附近运行。
当使用闭环PID自动调谐块的仿真和实时应用:
该植物必须是渐近稳定的(所有极点都是严格稳定的)或积分。自动调谐器块在不稳定的设备上不起作用。
已有控制器的反馈回路必须是稳定的。
为了实时更准确地估计被控对象的频率响应,在实验过程中尽量减少FOC PMSM模型中任何干扰的发生。自动调谐器块期望装置输出仅是对注入扰动信号的响应。
由于在实验过程中反馈回路是闭合的,现有控制器对注入的扰动信号也有抑制作用。采用闭环实验的优点是控制器能使装置保持在额定工作点附近运行,保持安全运行。缺点是,如果目标带宽距离当前带宽较远,则会降低频响估计的准确性。
连接自动调谐器与工厂和控制器
在所有三个PI控制器的PID块和工厂之间插入闭环PID自动调谐块,如FOC PMSM模型所示。的启动/停止信号启动和停止闭环实验。当没有实验运行时,闭环PID自动调谐器块行为像一个单位增益块,其中 信号直接传递到
信号直接传递到 .
.
若要查看修改后的外环控制结构,请打开Controller_Algorithm子系统。
controlSubsystem = [mdl' / Controller_Algorithm '];open_system (controlSubsystem)

查看修改后的d轴当前控制器。改进的q轴控制器具有相同的结构。
open_system ([controlSubsystem“/ DQ_Current_Control / D_Current_Control”])

配置自动调谐块
将闭环PID自动调谐块与设备模型和PID块连接后,对调谐和实验设置进行配置。
在调优选项卡,有两个主要的调优设置:
目标带宽-确定您希望控制器以多快的速度响应。在本例中,选择
5000Rad /sec为电流控制和One hundred.Rad /秒速度控制。
目标阶段保证金-确定您希望控制器的健壮程度。在本例中,选择
70电流控制和90速度控制的程度。
在实验表中,主要有三种实验设置:
植物类型-指定该植物是否渐近稳定或积分。在这个例子中,FOC PMSM模型是稳定的。
工厂签字-指定植物是正号还是负号。如果当设备达到新的稳定状态时,在标称工作点上设备输入的正变化导致设备输出的正变化,则设备符号为正。否则,植物符号为负。如果一个植物是稳定的,植物的符号等于它的直流增益的符号。如果一个植物在进行积分,如果植物产量持续增加(或减少),那么植物符号是正的(或负的)。在这个例子中,FOC PMSM模型有一个正的对象符号。
正弦振幅—输入正弦波的振幅。在本例中,选择
0.25对于当前控制器和0.01为速度控制器,以确保工厂是适当励磁在饱和限制。激励幅值过大或过小都会产生不准确的频响估计结果。
级联反馈环路调谐
由于闭环PID自整定模块一次只对一个PI控制器进行整定,因此在FOC PMSM模型中,三个控制器必须分别进行整定。首先调整内环控制器,然后调整外环控制器。
d轴电流控制器在1.3和1.35秒之间调节。
q轴电流控制器在1.4和1.45秒之间调节。
速度控制器在1.5 - 3.5秒之间调整。
调整每个PI控制器后,控制器增益通过数据存储内存块更新。
在正常模式下模拟自动调谐器块
在本例中,FOC永磁同步电机模型是在Simulink中建立的。金宝app所有三个控制器都被调到一个模拟中。此外,还比较了控制器调优前后的速度响应。
由于电机的电力电子控制器的采样时间小,FOC PMSM模型的仿真通常需要几分钟的时间在计算机上。
Sim (mdl) logsout_autotuning = logsout;保存(“AutotunedSpeed”,“logsout_autotuned”)
下图为整体仿真结果。

下图显示了调优期间从1.3秒到3.5秒的电流和速度响应。电流的变化在内部0.1电机转速的变化在2rad /秒(约1%偏差)。

三个PI控制器是调谐新的增益。
速度PI控制器的增益P = 0.2785, I = 2.678。
d轴电流PI控制器的增益P = 5.135, I = 8663。
q轴电流PI控制器的增益P = 4.59, I = 8026。
在自动调优过程之前和之后应用相同的速度命令。在使用闭环PID自动调谐块调整控制器之前和之后绘制速度响应。速度响应曲线及时对齐,并排比较控制器性能。
scdfocmotorPIDTuningPlotSpeed

调整控制器后,交流电机的速度响应具有较快的瞬态响应和较小的稳态误差。
bdclose (mdl)
另请参阅
相关的话题
你也可以从以下列表中选择一个网站: