根据规范验证操作点
根据输入,输出或状态规范计算操作点时,金宝app®Control Design™软件指示在修剪过程中是否在修剪过程中成功满足了规范。如果修剪未成功,要确定无法满足的规格,则必须验证修剪后的操作点是否对原始规范进行验证。
验证作业点稳态经理
使用时计算操作点稳态经理该软件创建了一个操作点报告对象,并突出显示违反规范中的约束的任何操作点值。
例如,考虑scdairframeTRIM模型。打开模型并设置速度和入射角参数。
sys =“scdairframeTRIM”;Open_System(Sys)alpha_ini = -0.21;v_ini = 933;
打开稳态经理,在Simulin金宝appk模型窗口中,在应用画廊,点击稳态经理。
为模型创建修剪规范。在这一点稳定状态选项卡,单击整齐规范。
在里面spec1文档,指定已知哪些状态,其处于稳态状态。
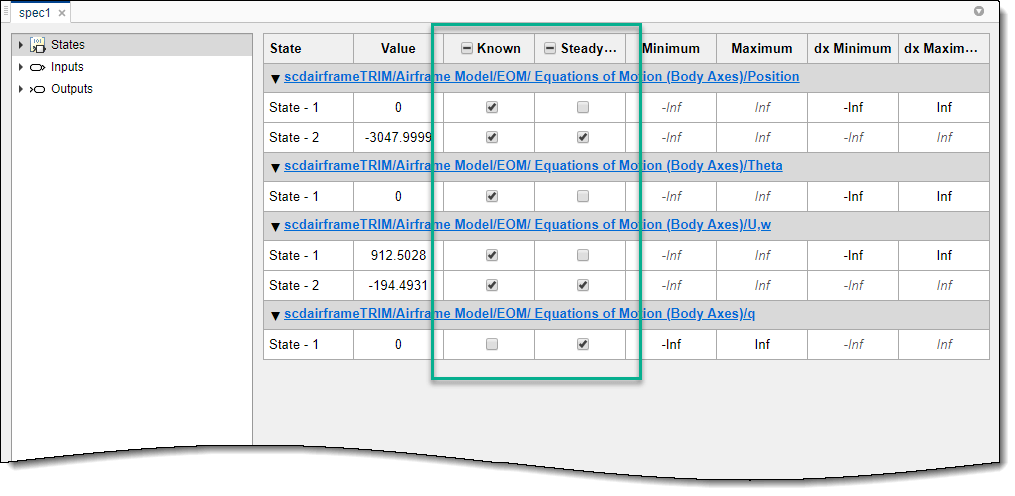
修剪模型,在规范选项卡,单击修剪![]() 。该软件生成一个操作点报告,并在相应的情况下报告1文档,突出显示红色的任何约束违规
。该软件生成一个操作点报告,并在相应的情况下报告1文档,突出显示红色的任何约束违规

优化搜索找不到满足规范的操作点。正如突出的那样稳态经理,则指定为稳态的三种状态是不稳定的。控件上指定的公差值与指定的约束的冲突程度大于报告选项卡,验证宽容场地。对于稳态条件,dx最低和DX最大值约束都是零;也就是说,每种状态的变化率都是零。在调整后的操作点实际DX.价值观违反了这些约束。

对于该模型,将第二位置状态指定为稳态会对系统造成过约束,使得不可能得到稳态解。
要删除此稳态约束,请更新规范。在里面spec1文件,在稳定状态列,清除相应的行。

在这一点规范选项卡,单击修剪![]() 。软件对模型进行裁剪并打开相应的报告标签。结果报告显示没有约束违规。
。软件对模型进行裁剪并打开相应的报告标签。结果报告显示没有约束违规。

您还可以根据一组规范验证现有的操作点。例如,检查模型初始条件是否满足spec1,首先根据模型初始条件创建操作点。在这一点稳定状态选项卡,单击手术点。该软件创建了一个操作点,并打开相应的op1.文档。
中的规范来验证这个操作点spec1,在这方面手术点标签,下面验证, 选择spec1。
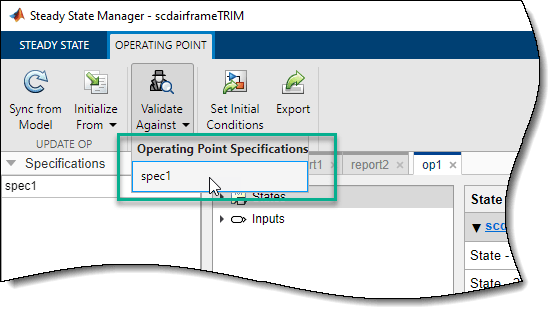
该软件创建了一个操作点报告并打开相应的报告3.文档。

模型初始条件不满足操作点规范,如突出显示的约束违规所示。
验证作业点模型线性化电路
使用时计算操作点模型线性化电路,该软件不突出显示约束违规。相反,您必须检查任何违规行为的操作点报告信息。
如果从上面修剪模型稳态经理实例中使用相同的规范模型线性化电路,该软件创建了一个操作点数据浏览器,在线性分析工作区。
检查工作点是否满足规定的约束条件,在数据浏览器,在线性分析工作区,双击操作点。

在“编辑”对话框中,对于这三个稳态规范,在实际DX.列违反零期望的dx.价值观。
验证命令行上的操作点
在命令行计算操作点时,findop默认情况下,函数将操作点报告输出到命令窗口。您还可以将操作点报告作为输出参数返回。有关更多信息,请参阅findop。要根据规范验证您的工作点,您必须检查工作点值是否满足约束条件。
例如,打开scdairframeTRIM模型并设置模型参数。
sys =“scdairframeTRIM”;Open_System(Sys)alpha_ini = -0.21;v_ini = 933;
创建一个工作点规范对象,并指定哪些状态是已知的,哪些状态是稳定的。
OPSPEC = OPERSPEC(SYS);opspec.states(1).known = [1; 1];opspec.states(1).steadystate = [0; 1];opspec.states(3).known = [1; 1];opspec.states(3).steadystate = [0; 1];opspec.states(2).known = 1;opspec.states(2).steadystate = 0;opspec.states(4).known = 0;opspec.states(4).steadystate = 1;
修剪模型。
op = condop(sys,opspec);
运行点搜索报告:---------------------------------模型scdairframeTRIM运行点搜索报告。(t=0时时变分量)找不到满足所有约束的解。放松约束,找到可行的解决方案。州 : ---------- ( 1) scdairframeTRIM /机身模型/加工/运动方程(轴)/位置x: 0 dx: 913 x: -3.05 e + 03 dx: -194 (0) (2) scdairframeTRIM /机身模型/加工/运动方程(轴)/θx: 0 dx: 0 (3) scdairframeTRIM /机身模型/加工/运动方程(轴)/ U, w x: 913 dx: 25.3 x: -194 dx:273 (0) (4) scdairframeTRIM /机身模型/加工/运动方程(轴)/ q x: 0 dx: 31.2(0)输入 : ---------- ( 1) scdairframeTRIM /δu: 0(负无穷到正无穷)输出 : ---------- ( 1) scdairframeTRIM /αy: -0.21(负无穷到正无穷)(2)scdairframeTRIM / V y: 933(负无穷到正无穷)(3)scdairframeTRIM / q y: 0(负无穷到正无穷)(4)scdairframeTRIM / az y:263 [-Inf Inf] (5.) scdairframeTRIM/gamma y: 0.21 [-Inf Inf]
在操作点搜索报告中,DX.指定稳定状态的值有零约束,如0.括号中的值。优化搜索没有找到稳态的操作点,因为所有这些状态都违反了约束。
也可以看看
职能
应用
相关的话题
你也可以从以下列表中选择一个网站: