代码生成金宝app的模板鹦鹉MiniDrone.
完成后设置和配置,使用代码生成simulink金宝app®模板创建要部署在鹦鹉上的模型®minidrone硬件。这个模板被设计用来旋转无人机上的四个电机,每个电机循环2秒。您可以更新此模板以添加您自己的逻辑来启动无人机。
打开代码生成模板
在MATLAB®命令提示符,键入
金宝app。在Simuli金宝appnk Start页面上,导航到金宝appSimu金宝applink支持包用于Parrot MiniDrones,选择代码生成模板。
将打金宝app开Simulink模型。此模型配置为代码生成,并包含两个inports., 二外港和A.子系统堵塞。有关更多信息,请参阅代码生成模板中的Inports和代码生成模板中的出口和信号。
笔记
这代码生成模板仅当您已安装金宝appSimu金宝applink支持包用于Parrot MiniDrones。有关更多信息,请参阅设置和配置。


代码生成模板中的Inports
代码生成模板模型包含两个inport.块,AC CMD.和传感器:
AC CMD.——这inport.连接到一个总线选择器块,提供五个输出信号: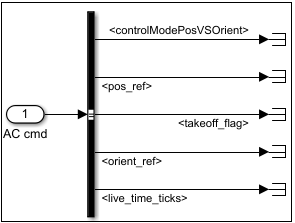
orient_ref信号。该信号设置为真正的如果两个间距和卷值都为零。这
< pos_ref >信号。< pos_ref >—一个表示X-,y-, 和Z.-轴值(以米为单位)的所需位置的无人机。< takeoff_flag >- 一个标志,设置为tere 1秒。执行start命令后,有2秒的校准时间,之后< takeoff_flag >设置为true,持续1秒。该标志在1秒之后被禁用。该标志可用于包含任何需要在无人机上的发动机启动时考虑的附加逻辑(例如,分离起飞和悬停所需的逻辑)。< orient_ref >-一个数组表示的偏航,俯仰,和滚值(弧度每秒),决定无人机的方向。
笔记
在代码生成模板中,来自
AC CMD.终止块。但是,您可以在基于模板设计模型时连接信号。传感器——这inport.连接到总线选择器,该总线选择器提供来自无人机上不同传感器的输出信号。这传感器进口又进一步分为Visionsensors.那Halsensors.,传感器扫描。
Visionsensors.连接到提供三个输出信号的总线选择块: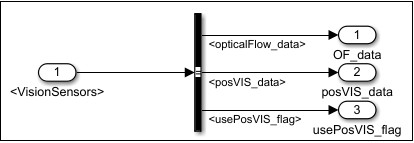
当前,来自图像处理线程的数据没有传递给
目前,
Halsensors.连接到总线选择块,该块从无人机的硬件抽象层(HAL)中导出值。信号值是从加速度计,陀螺仪,压力传感器,超声波传感器和电池获得的: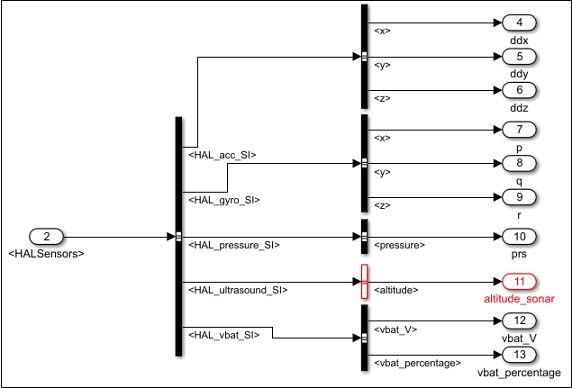
传感器扫描提供不同传感器值的校准值。校准超过400个周期(2秒),您可以获得8个值,包括:校准X那y,Z.加速度的价值
校准X那y,Z.角速度的值
校准大气压
校准的高度




代码生成模板中的出口和信号
代码生成模板中的出口是:
电机-这个出口被用来发送信号来启动无人机上的四个发动机。在代码生成模板中,使用四个脉冲发生器块向四个电机发送信号。这些块中的幅度值设置为400,其以相应的速度旋转电动机。脉冲发生器还提供相移,使得四个电动机循环地旋转2秒。
当您设计自己的控制器逻辑时,可以从控制器逻辑的输出导出到电机的信号。(使用1×4矢量作为输入
电机外港)。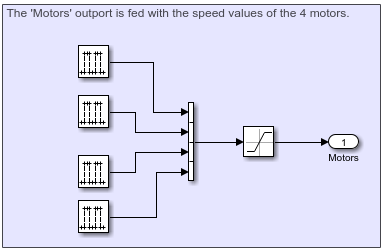
国旗- 此出口用于设置可用于停止无人机飞行的错误条件(停止电机)。值0表示没有错误,并且任何非零值表示错误。您可以在控制器逻辑中模拟多个错误条件,该错误条件对应于多个非零值,该值可以作为输入到此标志的输入。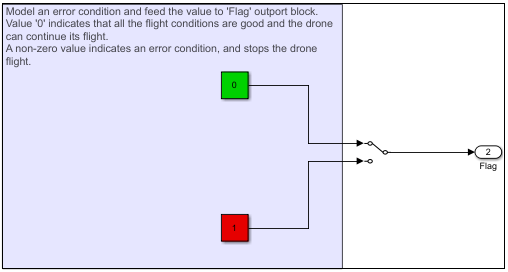


有关设置硬件和部署模型的详细信息,请参阅设置硬件和部署模型。
也可以看看
你也可以从以下列表中选择一个网站:
