系统辨识工具箱
从测量的输入-输出数据创建线性和非线性动态系统模型
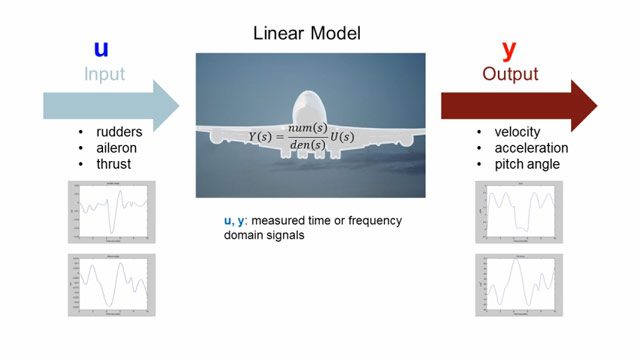
系统识别工具箱™提供MATLAB®功能,金宝app®块,和一个应用程序利用实测的输入-输出数据建立动态系统的数学模型。它允许您创建和使用不容易从第一原则或规范建模的动态系统模型。您可以使用时域和频域输入输出数据来识别连续时间和离散时间传递函数、过程模型和状态空间模型。该工具箱还提供了嵌入式在线参数估计算法。
工具箱提供了识别技术,如最大似然、预测误差最小化(PEM)和子空间系统识别。为了表示非线性系统动力学,可以用小波网络、树划分和s形网络非线性估计Hammerstein-Wiener模型和非线性ARX模型。工具箱执行灰箱系统识别以估计用户定义模型的参数。您可以在Simulink中使用识别的模型进行系统响应预测和工厂建模。金宝app工具箱还支持时间序列数据建模和时间金宝app序列预测。
开始:
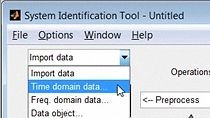
数据导入和预处理
输入测量的时域和频域数据。您可以通过执行反趋势、过滤、重采样等操作对数据进行预处理,还可以重构丢失的数据。
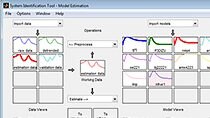
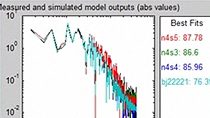
模型估计与验证
从测量的输入-输出数据中识别线性和非线性模型。您可以比较已识别的模型,分析它们的属性,计算它们的置信范围,并根据测试数据集验证它们。

状态空间和多项式模型
确定最优模型顺序并估计系统的状态空间模型。您还可以估计ARX、ARMAX、Box-Jenkins和Output-Error多项式模型。
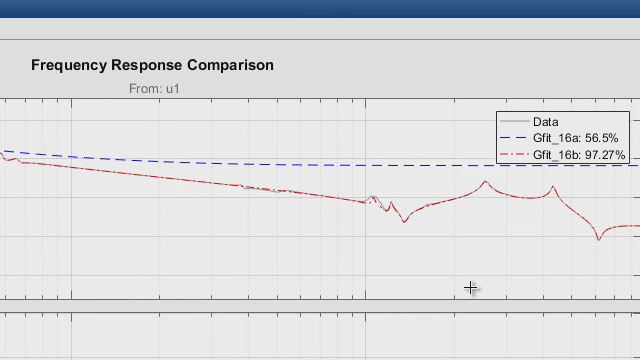
频率和脉冲响应模型
使用频谱和相关分析从频率和时域数据估计系统模型。频率响应数据也可以通过Simulink控制设计从Simulink模型中获得。金宝app
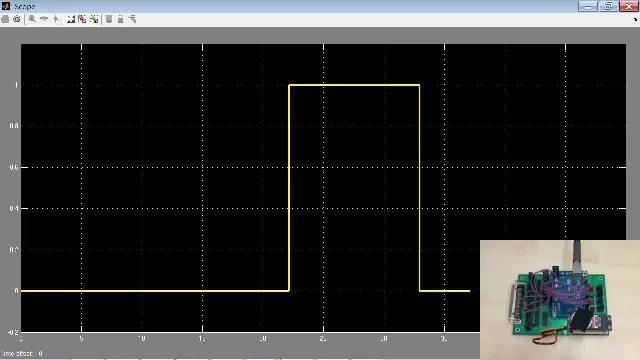
递归模型的参数估计
使用递归模型实时估计系统的模型,当新数据进来时更新它们的参数。您可以使用内置的Simulink块实现这些模型。金宝app使用Simulink Coder™从块生成C/ c++代码,以瞄准嵌入式设备。金宝app
卡尔曼滤波器的状态估计
利用线性、扩展或无迹卡尔曼滤波器以及粒子滤波器从实时数据估计系统状态。您可以使用内置的Simulink模块实现这些算法。金宝app使用Simulink Coder™从块生成C/ c++代码,以瞄准嵌入式设备。金宝app

与仿真软件的集成金宝app
在Simulink中使用内置块实现估计模型、状态估计器和递归模型。金宝app您可以使用这些块执行系统分析和控制设计任务。
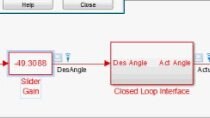
控制器设计
使用你估计的模型,用控制系统工具箱设计和调整控制器。在PID Tuner应用程序中使用系统识别功能,从测量数据或具有不连续的Simulink模型估计线性植物动态。金宝app

非线性ARX模型
通过将小波网络、树划分、s形网络和神经网络所代表的非线性与自回归模型相结合,为系统建模(使用 深度学习工具箱™ )。

非线性ARX模型估计
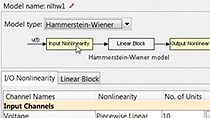
Hammerstein-Wiener模型
估计一个线性系统的输入和输出的静态非线性畸变。例如,您可以估计饱和水平影响输入电流运行直流电机。


双坦克系统用非线性灰箱模型比用线性模型更好地表示。
时间序列模型
估计时间序列模型,以适应测量数据从您的系统。然后,您可以预测时间序列模型的未来值,以预测您的系统将如何运行。

时间序列模型可以用来预测设备的健康状况。
