。
モデルのインポート
マルチボディモデルをsimscape multibody.环境にインポートします。このこのタスクに,关节小运动を使用し.cadモデル,urdfモデル,および机器人系统工具箱モデルをインポートできます.ROBOTICS系统工具箱モデルを作用成するは,装饰品ライセンスがです。この关键は,モデルを解析し,必要な解析抽出し,ボディ,拘束,ジョイントにsimscape multibodyブロックブロック使使ててを再ししししししし
URDFモデルはurdfファイルファイルなければならず,机器人系统工具箱モデルは刚性小组细胞オブジェクトオブジェクトでなければなりなりませませんモデルは适切适切なな形式形式でなければなりませんにでこれらをエクスポートににににににはにははsmexportonshape.をを用し.Autodesk®发明者®モデル,creo™参数モデル,またはsolidworks®モデルモデルは,simscape multibody link cadプラグインを使使ます。このプラグインは无偿で使。その他のソースのモデルに対するエクスポートアプリの例についてははカスタムsimscape.多体XMLスキーマを参照してください。
关节
smexportonshape. |
导出CAD装配模型onemape.云软件 |
小运动 |
导入CAD,URDF或机器人系统工具箱模型 |
トピック
デスクトップcadのインポート
ワークフロー,ツール,および生成されたモデルに重点を置い置いた変换ののたた変换のの
Simscape Multibody Linkプラグインプラグインの
Simscape Multibody Link.のcadエクスポートエクスポートプラグインのダウンロードととと
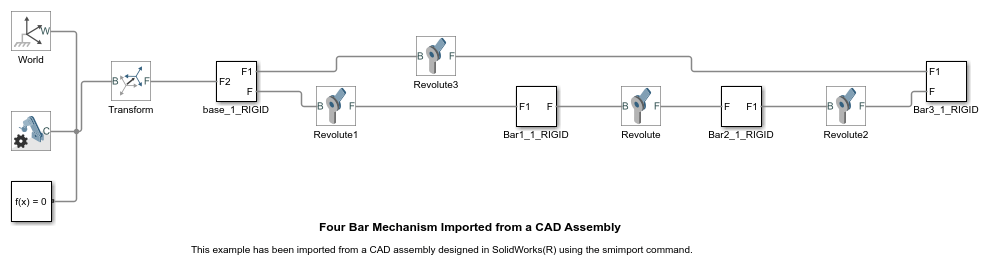
XMLマルチマルチボディ记述ファイルファイルsimscape multibody.モデルを生成する一定的な手顺。
关节小运动をを使た,マルチボディ记述xmlファイルからのアームアームアーム生成。
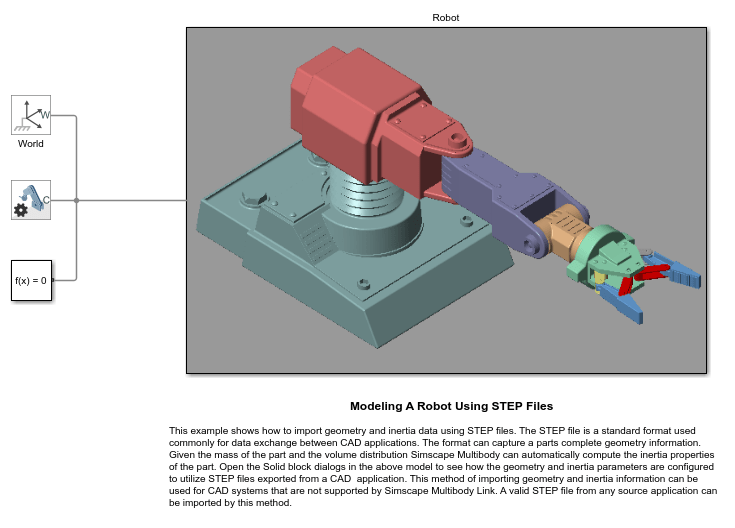
onemape.CADのインポート
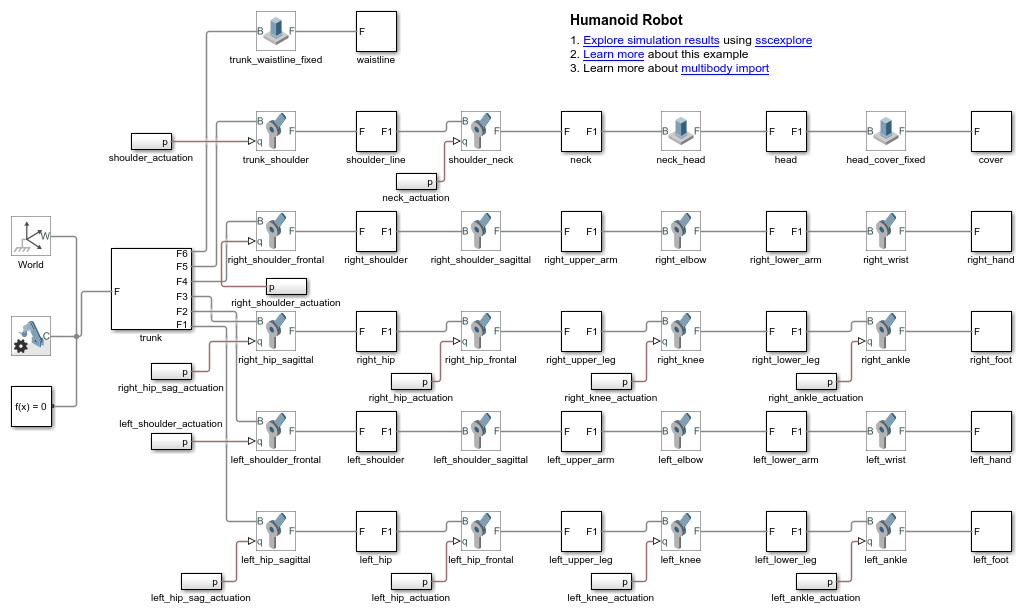
ヒューマノイドロボットを挂起®ソフトウェアからエクスポートし,simscape multibody.ソフトウェアにインポートする。
インポートワークフロー,ツール,およびユーザー认证に重点を置い,onshapeソフトウェアからのcadインポートの概要。
urdfのインポート
ヒューマノイドヒューマノイドロボットonshapeソフトウェアからエクスポートし,simscape multibody.ソフトウェアにインポートする。
ロボット工学界ででで使使れるれるurdf仕様について学习,后ほどsimscape multibody.环境にインポートする,単纯なurdfモデルを作用成。
URDFモデルモデルの。urdfエンティティのsimscape multibody.ブロックへのマッピング。単纯単纯urdfインポート例。
注目の例
您还可以从以下列表中选择一个网站:
