シミュレーションと解析
ブロック線図を更新し,モデルを組み立てて初期構成で可視化します。可視化は,力学的探险家で开かれます。モデルをシミュレートして,対话型のアニメーションを生长しし。物理モデルに适した(Ode15s)などののソルバーを必ず选択ててててををにに予想さ,シミュレーション时にされる,意味をもつ最速変変をできる程度に小さい値必ず指定
相机管理器を开き,アニメーションのキャプチャに使使するしはます。动力学探险师でのexplで対のexpl expl话话のexpl expl话expl expl expl话话expl expl expl话,机械探险师でexpl expl対,机械探险,アニメーションはカメラ,アニメーションは,アニメーションカメラ,キーフレームは,机械探险仪,机械探险仪で対话话的に作物成した视点间でででます。视频创造者または关节SMWRITEVIDEOを使用して,アニメーションをビデオ形式で記録します。
Kinematicsolverクラスクラス使使て,モデルの运动态的表现してて解き解き。Kinematicsolverオブジェクトにはははジョイントれてで补いしをターゲット,推定ターゲット,推定ターゲット,値ターゲット,値,値,値,値ます,を,値,値,値を,値,値,値,値,値,値,値,値,値,値,値,値,値,値,値,値,値,値,値,値,値,値,値,値,推定,値,推定ますし解析しししししししししししししますますますますししししし解析解析解析解析し解析解析し解析解析ますますししますますますしししししますますしますますますしますししししししししししししししししししししししししししししししししししし
关节有关部
トピック
基本的な可視化
モデルの更新またはシミュレーションに際して力学Explorerが必ず自動で開くように,モデルコンフィギュレーションパラメーターを設定。
標準ビューを選択し,上向き軸の規則を設定し,マウスショートカットを使用してモデルの回転,ロール,パンまたはズームを行う。
Simscape™多体™モデルを更新しシミュレートするためのワークフローステップ。
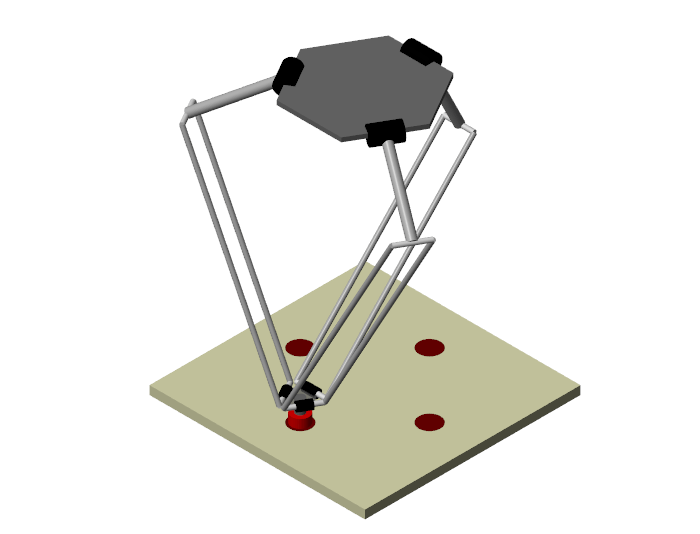
可視化は,マルチボディシミュレーションの中心部分であるだけでなく,ボディのモデル化とその形状,サイズ,座標系配置,色の確認に不可欠なツールでもあります。ここでは,Simscape多体環境で使用可能な可視化ユーティリティとそれらがモデリングワークフローで果たす役割の概要を説明します。
力学Explorerの座標系の強調表示と形象的ブロックを使用した,座标系の可视化。
高层可致原料
Mechanics Explorerからからのブロックへへの
Mechanics Explorerをを使使た,ツリービューペインのノードに対応ブロックへの移移。
机械探索器内内,繁体,ボディおよびマルチボディシステム表示と非表示を选択切り替える手段としてとしての视の
选択なた,关键词,关键词。
カメラおよびビデオ作物
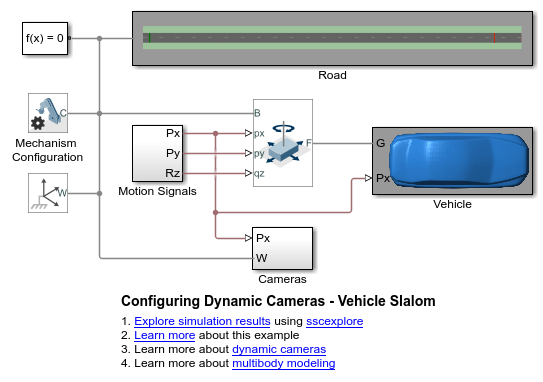
相机经理を使用して,移動する視点をもつモデルの可視化カメラを作成または編集します。
视频创建者または关流SMWRITEVIDEOを使用して,アニメーションをビデオ形式で保存する。
运动的カメラの作品成ツールの相机经理。
モデルのアニメーションの仕组みを确认し,アニメーションで使用可能な基本的な制御を调べる。
注目の例

你也可以从以下列表中选择一个网站:
