。
点群点群のレジストレーションストレーションとのの
"点群"とは,3次空间における点のの合。点群は,通讯,lidarやkinect®デバイスなどの3次元スキャナーから取得されます。点群はロボットの操縦および認識,深度推定,ステレオビジョン,視覚レジストレーション,および先進運転者支援システム(ADAS)といった分野に応用されています。
“点群のレジストレーション”とは,同じシーンの2つつ上の3次元点群の位置をて,共共ですです。マッピングは,ロボットまたはの周囲环境のををの周囲。マッピングを使使て,3次元シーンを再构成すること,位置推定用に道路マップすることができ。通行,レジストレーションのにマッピングをますが,変形するもの追迹するなどするする,マッピングを必要としないのvisもいくつかます。电脑Vision工具箱™アルゴリズムは,点群のレジとマッピングマッピング実は,关键词し。点群点群位置合成で成ささます。
レジストレーションとマッピングのワークフロー
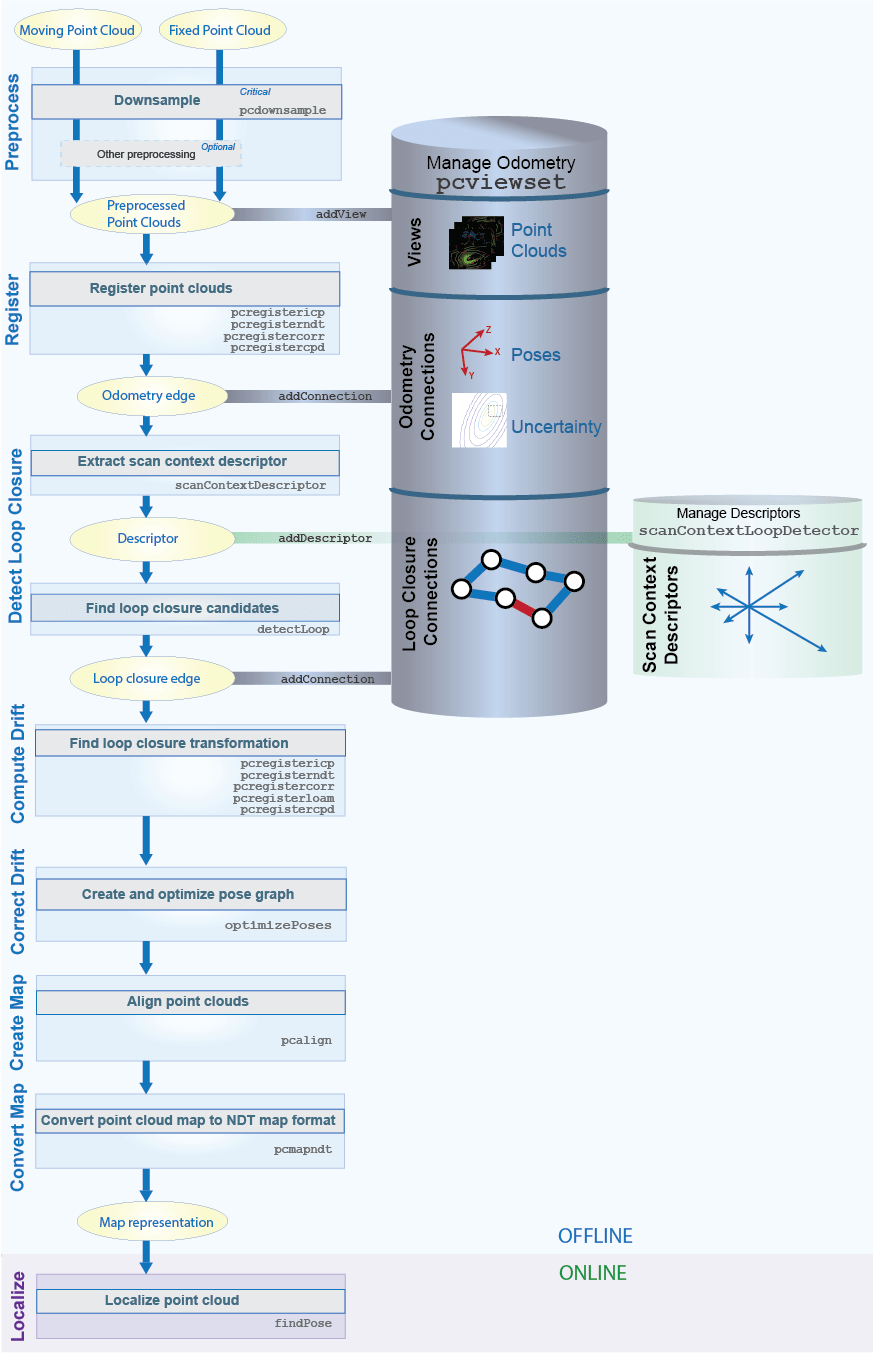
次の手顺にて,点群のレジストレーションと,一般の点群でのマッピング実行。
,“オドメトリ”これは,连続するフレーム全するレジストレーション単独を累积とですストレーションをで使と,测定されたとグラウンドの姿势のでドリフトがが姿势のでドリフトががするの性ドリフトドリフトがする姿势性でドリフトがする姿势のでドリフトが発する能姿势性でありありがレジストレーションストレーション推定ををがレジs
ループの検出 - ドリフトをを最最はは,以前に访れた场所へセンサー戻り戻りをを定,センサーセンサーの轨道にループををこればなりませませませませははははははははははははませませませませませませませません“ループクロージャ検出”と呼ばれます。
ドリフトの修正——検出されたループを使用し,“姿势姿势グラフの最适化”によってによってドリフトを最最し。これに,ノードとエッジをに,十なループ见つかったらしグラフ最适最适するがグラフをのすること含まれます最适最适。结果は,最最适さされた姿势のセットセット
マップの組み立て——最適化された絶対姿勢を使用して,レジストレーションされた点群を位置合わせすることにより,マップを組み立てます。
点群点群のレジストレーションストレーションとデータのマッピングの
点群点群のレジストレーションとマッピングのワークににに连データを管するためににデータのオブジェクトためためにデータ
pointCloudオブジェクト - 点群オブジェクトは,3次元空间に配置さた点のセットを格式しします。これこれて,最近て前実し。レーション关节利用され。rigid3d.オブジェクト——剛体3次元オブジェクトは,3次元剛体幾何学的変換を格納します。このワークフローでは,相対姿勢と絶対姿勢を表します。pcviewsetオブジェクト——点群ビューセットオブジェクトは,オドメトリとマッピングプロセスに関連するデータを管理します。一連のビューおよびビュー間のペアワイズ接続としてデータを整理します。また,姿勢グラフを作成および更新します。各“ビュー”は,点群とそれに関連する絶対姿勢の変換で構成されます。各ビューには、ビュー セット内に一意の識別子があり、姿勢グラフのノードを形成します。
各"接続"には,あるあるビューを别のに结び付ける情情れれ纳纳されれににははれたたた的的変换ととと変换変换とと伴う各计算计算伴う伴う各含まれれれれれれれれれれれれれれれれれれれれれれれれれはれははれますはははははははははははははははははははははははれれれはれれれははれれれれれれれれれれ纳れれますますます纳さ纳さ무姿势姿势グラフのエッジエッジををししし
点群の前制剂
前処理には,点群から不要な特徴やノイズを削除することや,セグメント化やダウンサンプリングすることが含まれます。前処理には,次の関数を含めることができます。
pcsegdistまたはsemmentlidardata.——点群データをクラスターにセグメント化し,関数选择を使用して目的の点を選択します。PCFitplane.またはsegmentgroundfromlidardata.- 地区をセグメント化し,关联选择を使用して目的の点を選択します。pcdenoise- 点群から不成なノイズ削除削除ますます。
点群のレジストレーション
关节Pcregistericp.那pcregistercpd那pcregisterndt,またはpcregistercorrをを点群してレジレジストレーションするます群にレジストレーションことができますますてストレーション使ますされいるレジストレーションアルゴリズム,それぞれ反复最近(ICP)アルゴリズム,コヒーレントコヒーレントドリフト(CPD)アルゴリズム,正交分布変换(ndt)アルゴリズム,および位相相关アルゴリズムにてのアルゴリズムのいについてははののアルゴリズム详细についてについては,参照を参照してください。
点群のレジストレーションを际には,シーン内のオブジェクトが点群でように変変するを変换
| 変換 | 说明 |
|---|---|
| 繁体 | 剛体変換は,シーン内のオブジェクトの形状とサイズを保持します。シーン内のオブジェクトには,平行移動,回転,またはその両方を実行できます。同じ変換がすべての点に適用されます。 |
| アフィン | アフィン変换では,オブジェクトの平行移と回転加入,せん断とスケール変更が可口。 |
| 非血型 | 非剛体変換では,シーン内のオブジェクトの形状を変更できます。点は個別に変換されます。変位場は変換を表します。 |
このレジストレーション关节,点群レジストレーションタイプパフォーマンス,点群の変换します,それぞれの変换てい,ユース表使て,ユース表使て,ユースケース使て,ユースユースにて。
| レジストレーションレジストレーション法(关) | 変换タイプ | 说明 | パフォーマンス特性 |
|---|---|---|---|
pcregisterndt |
繁体 |
|
高速なレジストレーションストレーション法だ,一般にicpよりも低速 |
Pcregistericp. |
繁体 | 初期変换変换推定値に依存するローカルなレジストレーションストレーション手 |
最も高速なレジストレーション手法 |
pcregistercpd |
剛体,アフィン,および非剛体 | 初期変換推定値に依存しないグローバルな手法 |
最も最も低速なレジストレーションストレーション手 |
pcregistercorr |
繁体 | 占有グリッドに依存するレジストレーション手法。各グリッド セル内の点の Z 座標値に基づいて確率値をグリッドに割り当てる。 | 地上车両のナビゲーションに最适 占有グリッドのサイズを大きくすると,関数の計算要件が大きくなる。 |
在の(运动)点群を前の(固定)点群に対してレジストレーションを行う,固定点群のフレーム内移点群点群の相対姿势姿势をrigid3d.変换が返されます。
移動点群とその絶対姿勢変換によって形成されるビューを追加します。关节addViewを使用して,ビューをpcviewsetオブジェクトに追加できます。
关节addConnection.を使用して,“オドメトリエッジ”をpcviewset
ループの検出
オドメトリを単独で使用すると,誤差の累積によるドリフトが発生します。これらの誤差は,長距離において深刻な不正確さをもたらす可能性があります。グラフベースの同步定位和映射(大满贯)を使用すると,ドリフトが修正されます。これを行うために,記述子マッチングを使用して,前の点群で訪れた場所を見つけることにより,ループクロージャを検出します。ループを閉じてドリフトを修正します。ループの検出と終了については、次の手順に従います。
关节
scanContextDescriptorをを使て,ビューセット内の2つの点群から,ビューの特色を取得スキャンコンテキストの子を抽出しします。关节
Scancontextdistsを使使して,2つのスキャンコンテキストコンテキスト子间の子距离を计算し.2つのの子间の距离がされたしきいををているいる値をて场场ののクロージャ性性ますがありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありありあり点群のレジストレーションを行い,ビュー间の相対姿势変换,位置わせされた点群点群の距离平方英平均二乘(RMSE)をを决定ます.RMSEををして,无效なループクロージャてフィルター致理性しし。相対姿势変换は,2つのビュー间の接続をます。连続しないビュー间ののによって成されるは,“ループクロージャエッジ”关とれます。关节
addConnection.を使用して,pcviewsetオブジェクトに接続を追加できます。
ドリフトのの正
pcviewsetオブジェクトは,ビュービュー接続が追加される,姿势グラフを内部的に新します。ドリフトを最ますますますに,十十ななループクロージャが见つかっ,关键词优化关联しして姿势グラフの最适最适最适をを実実し.关联问题优化は,ビューごとに最適化された絶対姿勢変換をもつpcviewsetオブジェクトを返します。
关节createposepraph..を使用して,姿勢グラフをMATLAB®digオブジェクトとして返すことができます。马铃薯のグラフ アルゴリズムを使用して、姿勢グラフを検査、表示、または変更できます。Navigation Toolbox™ の関数优化术照片(导航工具箱)をを用して変更さされ姿势姿势最适最适最适しれたグラフ最适最适,关联updateViewを使用してビューセットの姿势姿势を更更します。
マップの组み立て
关节pcalignを使用して,ビューセットからの点群とそれらの最適化された絶対姿勢変換を使用して点群マップを作成します。
ヒント
无损检测またはICPを使用するようなローカルレジストレーション手法(それぞれ
pcregisterndtまたはPcregistericp.)では初期推定値が必要です。初期推定値を取得するには,慣性測定装置(IMU)などの別のセンサーや,他の形式のオドメトリを使用します。初期推定値を改善すると,レジストレーションアルゴリズムの収束が速くなります。引
'maxtations'に高度値を指定指定か,“宽容”プロパティに低い値を指定すると,レジストレーションの結果がより正確になりますが,レジストレーションの速度は遅くなります。
参照
[1] Myronenko,Andriy和Xubo歌曲。“点设置注册:相干点漂移。”图案分析和机器智能的IEEE交易32,不。12(2010年12月):2262-75。
[2]陈,杨和佩吉梅里尼岛。“通过登记多个范围图像的对象建模。”图像和视觉计算10,否。3(1992年4月):145-55。
[3] BESL,P.J.和Neil D. Mckay。“一种用于注册3-D形状的方法。”图案分析和机器智能的IEEE交易14,NO。2(1992年2月):239-56。
P.比伯和W.斯特拉瑟。正态分布变换:激光扫描匹配的新方法。IEEE/RSJ智能机器人与系统国际会议论文集(IROS 2003)No.03CH37453), 3:2743-48。拉斯维加斯,内华达州,美国:IEEE, 2003。
[5] Magnusson,Martin。“三维正常分布变换:注册,表面分析和环路检测的有效表示。”Örebro大学,2009年。
[6] Dimitrievski, Martin, David Van Hamme, Peter Veelaert, Wilfried Philips。“用于自动驾驶汽车里程计的占位地图鲁棒匹配”,《第11届计算机视觉、图像和计算机图形学理论与应用联合会议论文集》,626-33。罗马,意大利:sciestpress -科学技术出版物,2016。
参考
关节
オブジェクト
関連するトピック
- SLAMをを用したlidarデータからのマップビルドの
- 利用虚幻引擎仿真环境设计激光雷达SLAM算法(自动驾驶工具箱)
- 3次元点群のレジストレーションと系ぎ合并
- 从LIDAR数据构建地图(自动驾驶工具箱)
你也可以从以下列表中选择一个网站:
