主要内容
このページは前リリースの情报です。该当の英语のページはこのリリースで削除されています。
カメラキャリブレーションと3次元ビジョン
カメラの内部パラメーター,歪み系数およびカメラの外部パラメーターの推定,2次元イメージからの3次元情报の抽出,鱼眼キャリブレーション,ステレオ平行化,深度推定,3次元再构成,三角形分割および从运动结构の実行
“カメラキャリブレーション”は,特别なキャリブレーションパターンのイメージを使用してカメラのパラメーターを推定するプロセスです。パラメーターには,カメラの内部パラメーター,歪み系数およびカメラの外部パラメーターがあります0.3次元ビジョンは,シーンの2つ以上のビューから3次元のシーンを再构成するプロセスです。计算机视觉工具箱™では,キャリブレーションされたカメラのステレオペアを使用して,高密度の3次元再构成を実行できます。また,キャリブレーションされていないカメラのステレオペアを使用して,シーンを未知のスケールに再构成することも可能です。さらに,キャリブレーションされた単一カメラを使用して,复数のイメージから低密度の3次元再构成を计算することもできます。
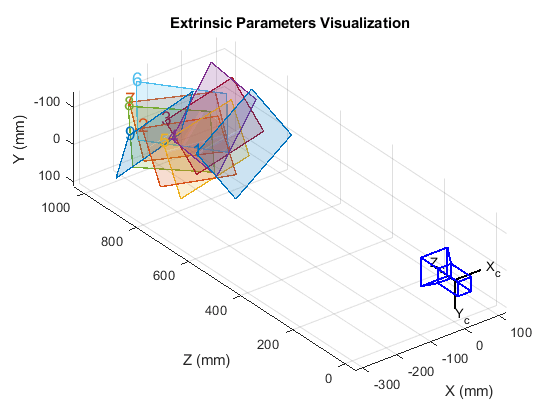
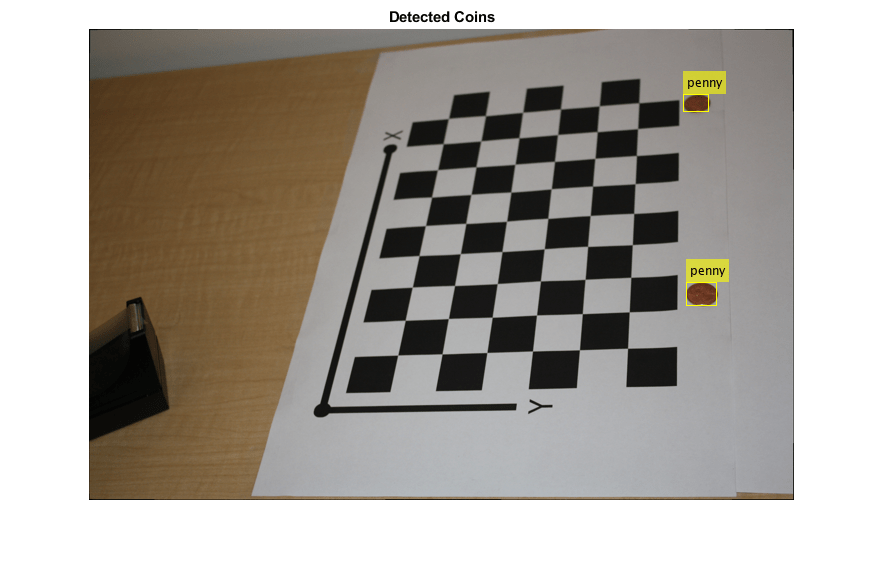
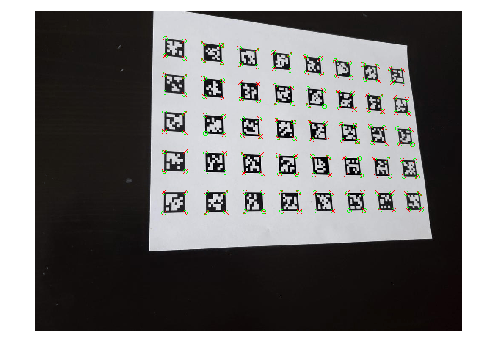
カメラキャリブレーターアプリを使用してカメラの内部,外部およびレンズ歪みのパラメーターを推定します。これらのカメラパラメーターは,イメージからのレンズ歪み效果の除去,平面オブジェクトの测定,复数のカメラからの3次元シーンの再构成およびその他のコンピュータービジョンアプリケーションの実行に使用します。
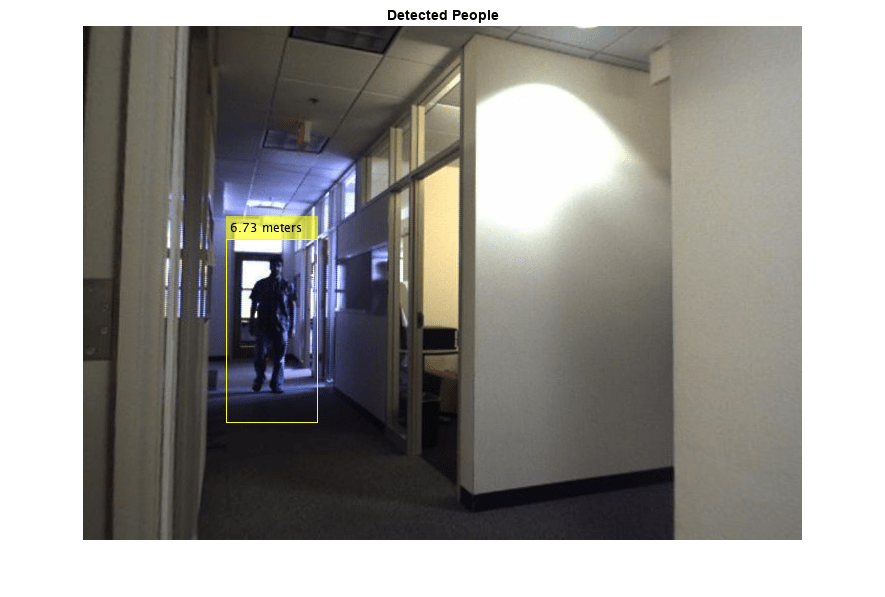
ステレオカメラキャリブレーターアプリを使用して,ステレオカメラをキャリブレーションします。その后,カメラを使ってイメージから深度を复元します。このアプリは2台のカメラそれぞれのパラメーターを推定します。また,カメラ1を基准としたカメラ2の相対的な位置と方向も计算します。
- 単一カメラとステレオカメラのキャリブレーション
内部パラメーター,外部パラメーターおよびレンズ歪みパラメーターの推定,鱼眼キャリブレーションの実行,2次元イメージからの3次元情报の抽出 - ステレオビジョン
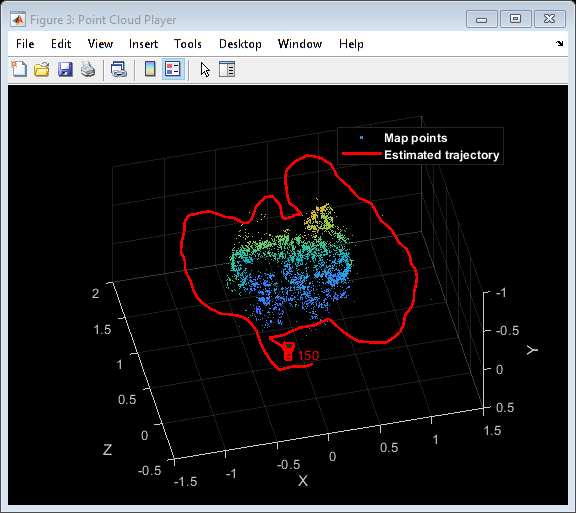
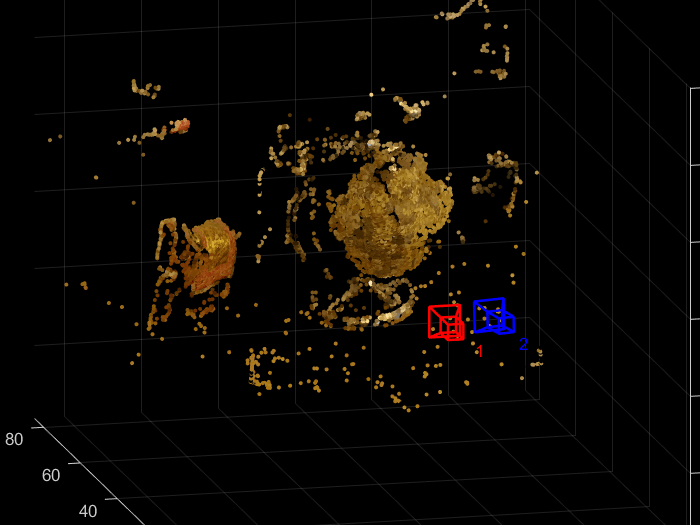
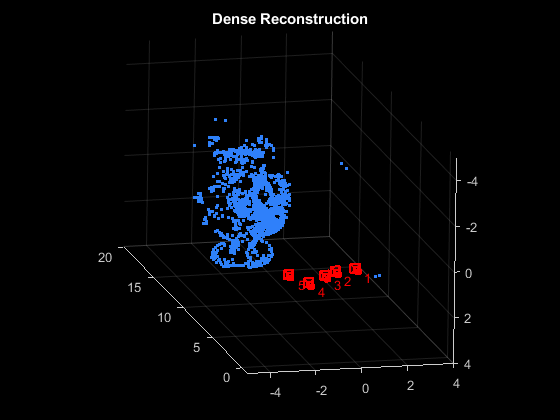
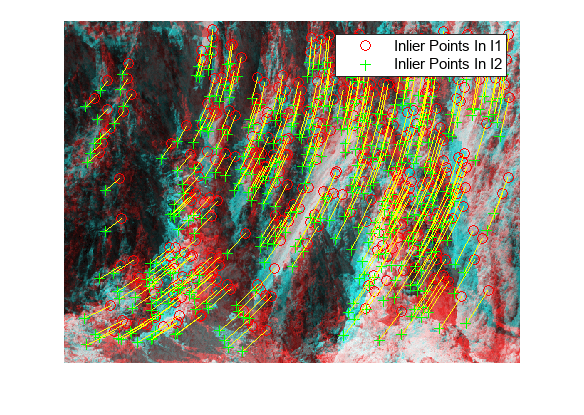
ステレオ平行化,视差および高密度3次元再构成 - 从运动结构
复数のビューからの3次元再构成
注目の例
您还可以从以下列表中选择一个网站:
