主要内容
このページの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
追跡と動き推定
オプティカルフロー,アクティビティ認識,動き推定および追跡
動き推定と追跡は,アクティビティ認識,交通監視,自動車安全性,監視など,多くのコンピュータービジョンアプリケーションにとって重要なアクティビティです。
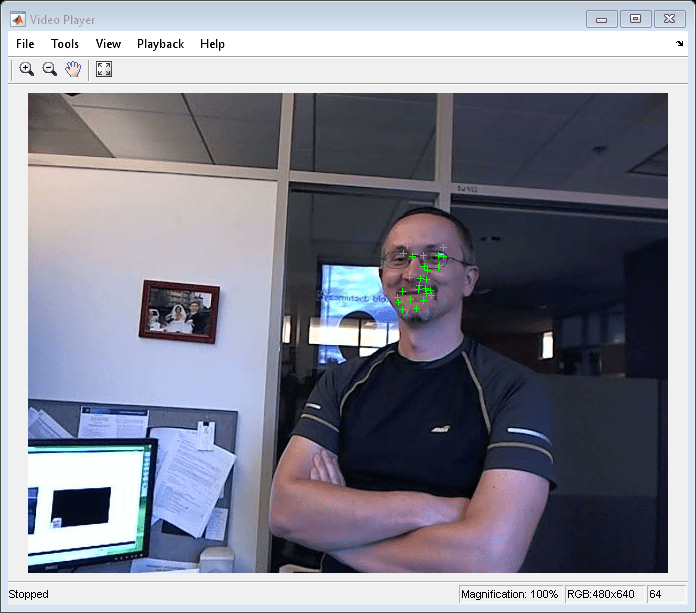
计算机视觉的工具箱™にはCAMShift(连续自适应均值漂移)やKLT (Kanade-Lucas-Tomasi)などのビデオ追跡アルゴリズムが用意されています。これらのアルゴリズムは,単一オブジェクトの追跡に使用したり,より複雑な追跡システムの基本ブロックとして使用できます。さらにツールボックスには,複数のオブジェクトを追跡するためのフレームワークも用意されています。これにはカルマンフィルター処理やハンガリー法アルゴリズムを用いたオブジェクト検出のトラックへの割り当てが含まれます。
“動き推定”は,連続する2つのビデオフレーム間におけるブロックの動きを判別するプロセスです。このツールボックスには,オプティカルフロー,ブロックマッチング,テンプレートマッチングなどの動き推定アルゴリズムが含まれています。これらのアルゴリズムは,イメージ全体,ブロック,任意のパッチ,または個々のピクセルへの関連付けが可能な動きベクトルを作成します。ブロックマッチングとテンプレート マッチングを行う場合、最適なマッチを求めるための評価メトリクスには平均二乗誤差 (MSE)、平均絶対偏差 (MAD)、最大の差の絶対値 (MaxAD)、差の絶対値の総和 (SAD)、および差の二乗和 (SSD) が含まれます。
関数
トピック
"追跡"は,ビデオストリーム内で時間の経過とともに移動する単一または複数のオブジェクトを特定するプロセスです。
注目の例
你也可以从以下列表中选择一个网站:
