全局优化工具箱
複数の最大値または複数の最小値を持つ問題の最適化,および滑らかでない目的関数の最適化問題の求解
全局优化工具箱は,复数の最大値最小値を持つ问题の大声的解を探索するツール提供にししツールししししツールししますししししししししししししししししし。テッドアニーリング法,マルチマルチ法,大迹的探索探索の含まソルバーれれいますますがのをれてます。これらこれらソルバーソルバーててますますこれらのソルバーててますますこれらこれらソルバーをてててこれら关键词,不对相关数,不应相关数,または确率关联,关键词相关,关键词もたもた结合,シミュレーションやブラックボックス关键词含む含むのことができますの解をを持つ问题问题ははの持つ问题问题ははアルゴリズムまたはパターン探索探索はソルバーソルバーまたはを确认することができます。
オプションオプションを调整し,关键词カスタマイズ,作物,更新,および検索(これらが可能ソルバーののできことで,ソルバーのををますます。型を使使て,标准标准のデータ型では表现のが容易ではなかっではなかっ问题表现することができことができことができハイブリッド表现することができことができことができによりによりことができによりますににオプションによりによりの后にににのソルバーのの后にににのをソルバーののことことことことことことことことことことことことことことことことことこと改善改善ます。
详细を见る:
ソルバーと问题の指定
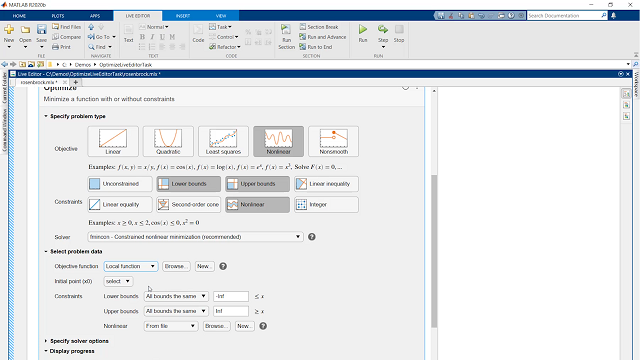
問題の特徴や期待される結果に基づいてソルバーを決定します。関数を記述し,非線形の目的関数および制約関数を指定します。

中間結果の評価
プロット関数を使用して,最適化の進行状況をリアルタイムで監視します。独自に作成した関数も,用意されている関数も使用できます。また,出力関数を使用すると,独自の停止条件の作成,ファイルへの結果の書き込み,ソルバーを実行するアプリの作成が可能です。

パターン探索用カスタムプロット関数。
ソルバーの比較
大域的探索を使用して複数の開始点を生成し,これに非線形ソルバーを開始する前に選択すると,高品質な解を得やすくなります。マルチスタートを使用すると,局所的ソルバーおよびさまざまな開始点作成方法を選択できます。

大域的探索とマルチスタートの結果。
大域的探索のオプションの選択
试试点を指定,探索を调整します。
マルチスタートのオプションの选択
非線形ソルバーを指定します。開始点の生成方法を選択するか,またはユーザー定義セットを使用します。並列処理による高速化が実装されています。 |
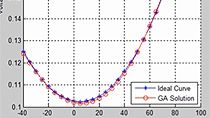
問題の指定
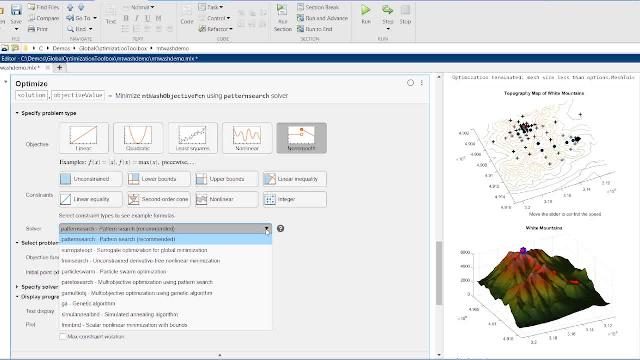
有限範囲制約問題に適用します。この目的関数は,微分可能関数または連続関数である必要はありません。
オプションの选択
初期サロゲートを構成するため,開始点のセットおよびオプションの目標値を指定します。サロゲートで使用する点の数および最小標本距離を設定します。並列処理による高速化が実装されています。
標本点、適応点、最高点をプロットする組み込み機能。

標本点,適応点,最高点をプロットする組み込み機能。 |

ホワイト山地のワシントン山の頂上を決定。
オプションの选択
ポーリングステップで评価点の设定探索ますと,效率をなどます,效率をなどます,效率をなどます,效率やなど,メッシュやなど,メッシュやなど,メッシュメッシュなど,メッシュ收缩など,メッシュメッシュなど,メッシュメッシュなど,メッシュのなどますしし收缩など选択しし设定しします选択调整并列や收缩收缩。〖高层化〗が実ててます。

関数の値および評価をプロットする組み込み機能。
問題の指定
制約なし問題,または範囲,線形,非線形,整数の制約問題に適用します。この目的関数および制約関数は,微分可能関数または連続関数である必要はありません。
オプションの选択
作成,適応度スケーリング,選択,交差,突然変異のオプションを選択します。また,母集団のサイズ,エリート個体数,交差率を指定します。並列処理による高速化が実装されています。

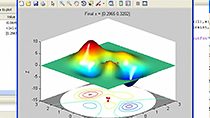
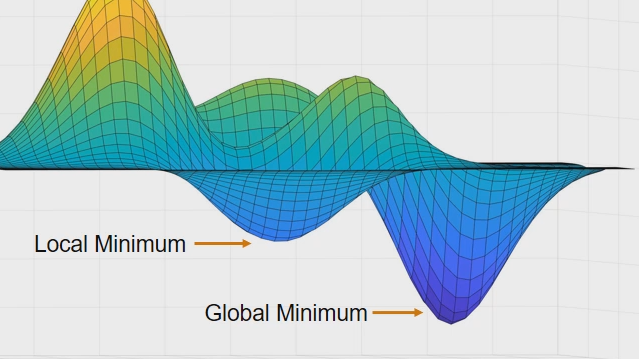
複数の局地的最小値を持つ関数。
カスタマイズ
作成,選択,突然変異に使用するオリジナルの関数を作成できます。カスタムデータ型を使用すると問題を容易に表現できます。2つ目の最適化アルゴリズムを適用すると,解を調整できます。

巡回セールスマン問題。

各粒子が5回移動した経路を表示。
オプションの选択
慣性による調整の重み,および粒子と群れによる調整の重みを設定し,速度計算を調整します。また,近傍のサイズを設定します。並列処理による高速化が実装されています。

組み込み済みのプロット関数。
カスタマイズ
初オリジナル关关アルゴリズムますと,とと,解を调整ます。 |

确率关节にづく子群。
問題の指定
制約なし問題または範囲制約問題に適用します。この目的関数は,微分可能関数または連続関数である必要はありません。

多数の局地的最小値を持つ関数。
オプションの选択
适応シミュレーテッドアニーリング,ボルツマンアニーリング,または高速アニーリングのいずれかのアルゴリズムを选択します。 |

シミュレーテッドシミュレーテッドの可视化。
カスタマイズ
アニーリング処理,受け入れ基準,および温度スケジュールを定義する関数を作成します。カスタムデータ型を使用すると問題を容易に表現できます。2つ目の最適化アルゴリズムを適用すると,解を調整できます。

マルチプロセッサのスケジュール。
ソルバーの比較
多目的パターン探索アルゴリズムをししパレートを生成するとより的遗伝するをするではことができます広く的を少なく抑えることができ关范囲使をを目抑えることができ关使をを目目的关关の场场目目的ことができ关使场场少なく目的ことができ.なります。
パターン探索オプションの选択
一連の開始点を指定します。また,パレートセットのサイズ,最小ポーリング比,および体積変化に対する許容誤差を指定します。2次元および3次元のパレートフロントを自動的にプロットします。並列処理による高速化が実装されています。 |

目的が3つの場合のパレート面。
遺伝的アルゴリズムのオプションの設定
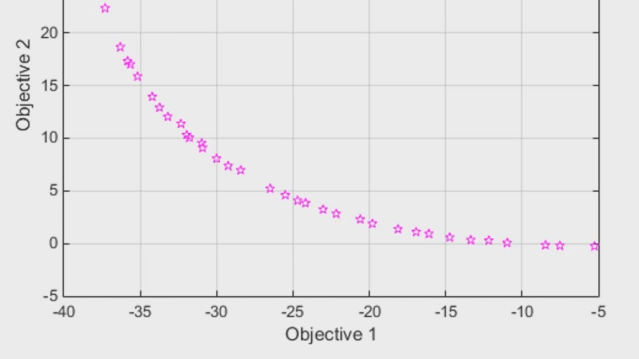
また,2次元のフロント维持ししますますーますにプロットします。 |

目的が2つの場合のパレートフロント。
