ROS工具箱
ROSベースのアプリケーションを設計,シミュレーション,および展開
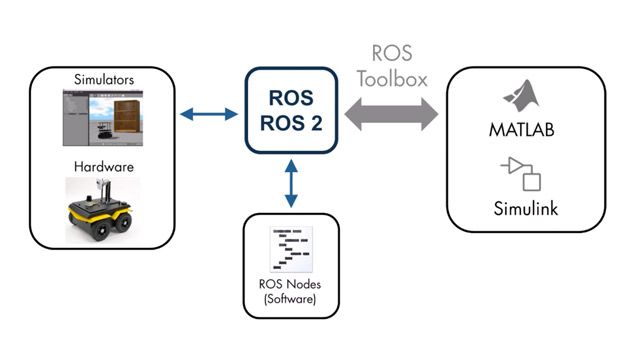
ROS工具箱は,MATLAB®と仿金宝app真软件®をロボットオペレーティングシステム(ROSおよびROS 2)に接続するインターフェイスを提供し,ROSノードのネットワークを作成できます。ツールボックスには,MATLAB関数と仿真金宝app软件ブロックが含まれ,rosbagファイルに記録されたROSデータをインポートし,分析し,再生します。また,ライブROSネットワークに接続して,ROSメッセージにアクセスすることもできます。
ツールボックスでは,デスクトップシミュレーションを介して,また露台などの外部ロボットシミュレーターに接続することによって,ROSノードを検証することができます。ROS工具箱は、c++コード生成(MATLAB编码器™と金宝app仿真软件编码器™を使用)をサポートし,仿金宝app真软件モデルからROSノードを自動的に生成し,シミュレーション上または物理ハードウェアに展開することができます。金宝app仿真软件エクスターナルモードをサポートすると,モデルがハードウェア上で実行されている間にメッセージを表示し,パラメーターを変更できます。
詳細を見る:

ROSネットワーク通信
ROSまたはROS 2に接続して,探索します。イントロスペクションを使用して,使用可能なトピックおよびタイプをリストします。ROSメッセージの詳細な構造を表示します。

ROSネットワークへの接続
ROSネットワーク設定
異なるデバイス間で通信するために,独自のROSまたはROS 2ネットワークを作成し,定義します。タスクと情報を配布するために,複数のROSノードを設定します。

ROS 2ネットワークの例
出版商および订户
发布-订阅セマンティクスを使用して,ROSメッセージまたはROS 2メッセージを送受信します。

センサーデータに加入し,ホイール速度をパブリッシュするための仿金宝app真软件モデル
サービスとアクション
クライアント/サーバーアーキテクチャを使用して,要求を送信し,タスクを実行し,ROSアプリケーションでフィードバックを取得します。

ROSサービスおよびアクションを使用するクライアント/サーバー交互作用
パラメーターサーバー
ROSパラメーターサーバーを使用して,複数のノードの構成オプションを格納し,ノードの動的再構成を有効にします。

車両ギア選択を制御するためにROSパラメーターをクエリし,設定する仿真软金宝app件モデル
ROSログファイル(rosbag)
Rosbagファイルをインポートして,ログデータをフィルター,可視化,および解析します。

rosbagファイルからのROSデータ選択のワークフロー
組み込みメッセージ
ROSアプリケーションには,サポートされているROSメッセージパッケージのライブラリを使用します。

サポートされるROSメッセージの例
カスタムメッセージ
カスタムメッセージサポートを使用して,ROSまたはROS 2アプリケーション用の新しいメッセージタイプを追加します。

ROS 2カスタムメッセージの生成
ノード生成
ROSまたはROS 2の機能を使用するスタンドアロンアプリケーション用のc++コードを生成します。

从Simulink生成一个独立的ROS 2节点。金宝app探索图库(6张图片)

ROSベースのシミュレーター上で動作するロボットを制御するための仿真金宝app软件モデル
