ベクトル制御(磁界方向制御)
シミュレーションを使用したベクトル制御アルゴリズムの開発
电机控制Blockset
设计与实施电机控制算法
ベクトル制御(磁界方向制御)を利用することで,誘導モーター,永久磁石同期モーター(永磁同步电动机),およびブラシレス直流(刷)モーターなどの様々な種類のモーターに対して,最大トルク/電流制御(MPTA制御)または弱め磁束制御を適用することができます。
以下のブロック線図は,次のコンポーネントを含むベクトル制御の構造を表しています。
- 2つのπコントローラーで構成されたインナーループの電流コントローラー
- オプションのアウターループの速度コントローラーと電流指令ジェネレーター
- 静止静止座标系と回転回転座标系変换変换するためためののを変换するためための変换(クラーククラーク换),公园(パークパーク换),逆公园
- 電圧指令vα_refおよびvβ_refをインバーターの6つの半導体デバイスに供給するパルス幅変調信号に変換するための空間ベクトル変調アルゴリズム
- スタートスタートアップおよびシャットシャットダウンロジックなどの保护および补助机
- センサーレス制御が必要ななな,回転子の角度を推定オプションオプションオブザーバー
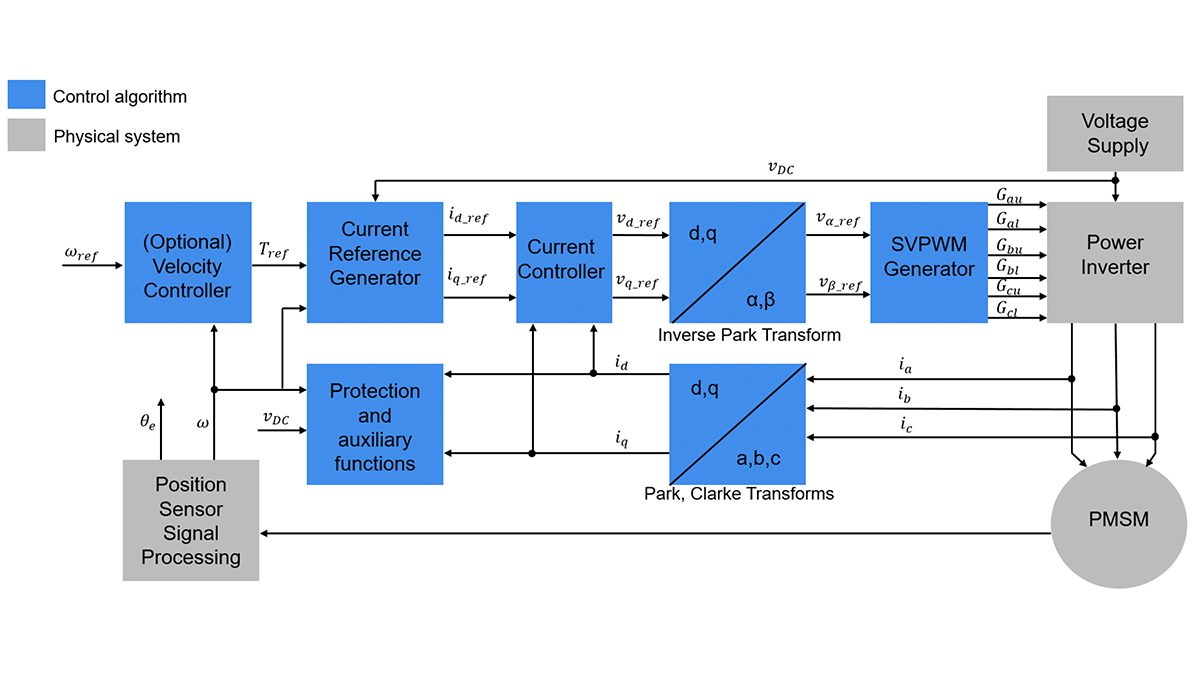
ベクトル制御のブロック線図。
ベクトル制御を設計するモーター制御のエンジニアは,次のタスクを実施します。
- インナーループの電流制御のための2つのπコントローラーをもつ制御構造を開発
- オプションのアウターループの速度および位置制御のためのπコントローラーをもつ制御構造を開発
- 性能要件を満たすためすべてのπコントローラーのゲインを調整
- PWM制御のための空間ベクトル変調器の設計
- センサーレス制御が使用されている場合,回転子の位置と速度を推定するオブザーバーのアルゴリズムを設計
- 最適な電流指令id_refとiq_refを生成するための最大トルク/電流制御(MPTA制御)または弱め磁束制御アルゴリズムを設計
- 効率的に演算を行う公园変換(パーク変換),克拉克変換(クラーク変換),および逆公园変換(逆パーク変換)の実装
- 故障検出および保護ロジックの設計
- 様々な動作条件でコントローラーの性能を確認して検証
- 固定または浮動小数点のコントローラーをマイクロコントローラーまたはFPGAに実装
金宝app®を使用したベクトル制御の設計により,マルチレートのシミュレーションを使用して制御アルゴリズムを設計,調整,および検証し,ハードウェアでのテスト前にモーターのすべての動作範囲でエラーを検出して修正することができます。金宝app仿真软件のシミュレーションを使用して,プロトタイプによるテストの量を減らして,ハードウェアではテストできない異常や故障状態で制御アルゴリズムのロバスト性を検証することができます。以下のタスクを実施することができます。
- 三相の同期マシンおよび非同期マシンなどの,様々なタイプのモーターをモデル化。簡単な第一原理の集中定数モデルから,ANSYS®麦克斯韦®やJMAG®などの有限元分析ツールからインポートされた詳細度の高い磁束に基づく非線形モデルまで,様々なレベルの詳細度でモデルを作成して切り替えることができます。
- 電流コントローラー,速度コントローラー,および変調器のモデル化。
- インバーターなどののパワーパワーエレクトロニクス回路モデルモデル
- ボード線図や根軌跡などの古典的な線形制御設計手法,およびPIDゲインの自動チューニングなどの手法を使用して,制御システムのゲインを調整。
- スタートアップ,シャットダウン,およびエラーのモードをモデル化し,安全なモーター運転を確保するためにディレーティングおよび保護ロジックを設計。
- 回転子の位置と速度を推定するオブザーバーのアルゴリズムを設計。
- 電流指令id_refとiq_refを最適化して,電力損失を最小化,定格回転子速度以上での動作,および不確定なパラメーター条件での動作を補正。
- I / Oチャンネルのための信号。
- モーターとコントローラーの閉ループシミュレーションを実施して,正常および異常の動作シナリオでシステム性能をテスト。
- ラピッドプロトタイピング,ハードウェアインザループテスト,および実機環境への実装のために,ANSI, ISO,またはプロセッサ最適化されたCコードおよびHDLの自動生成。





ブラシレス直流モーター制御入門
使用例および使い方
ユーザー事例
ソフトウェアリファレンス


パワーエレクトロニクス制御コミュニティを探索する
金宝app仿真软件を使用してパワーエレクトロニクス制御を電気自動車,再生可能エネルギー,バッテリーシステム,電力変換,およびモーター制御に適用するための学生,研究者,エンジニア向けのMathWorksコミュニティ。

無料評価版を入手する
30日間の無料評価版はこちら