モーター制御向け空间ベクトルベクトル(SVM)
空间ベクトルパルス幅変调を使し,acモーター制御向けアルゴリズムの装
空间ベクトル変调のの的
以下の等価回路で表される6つのスイッチがある三相インバーターでモーター制御を行うための空間ベクトル変調の概念について考えてみましょう。8つの有効なスイッチングパターンがあります。
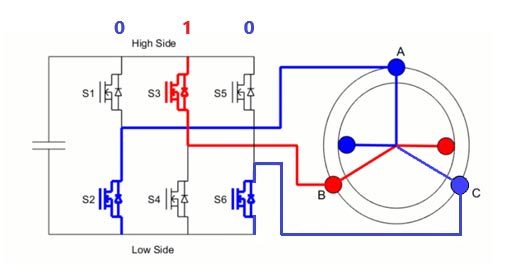
モーターの固定子巻巻にされた三相インバーター回路。
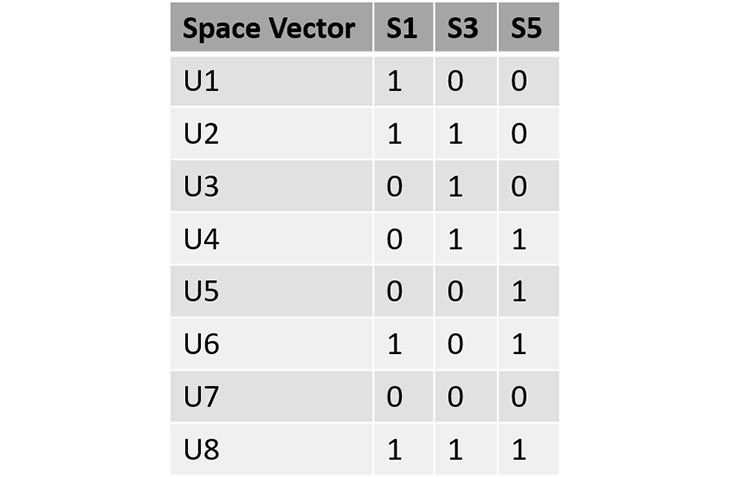
*スイッチS2,S4,S6,S6,S3,S3,S5の状态とそれぞれです。
各モータースイッチングによって,モーターモーター子に特点の电阻待加载さます。これらの电池は基本空间ベクトルであり,空间ベクトルの六角でそれら大厦さと形をを表し表し表し表します表しますますますますます表し表し表し表し表し表し表し表し表し表し表し表し表し表し表し表し表し表し表し表し表し
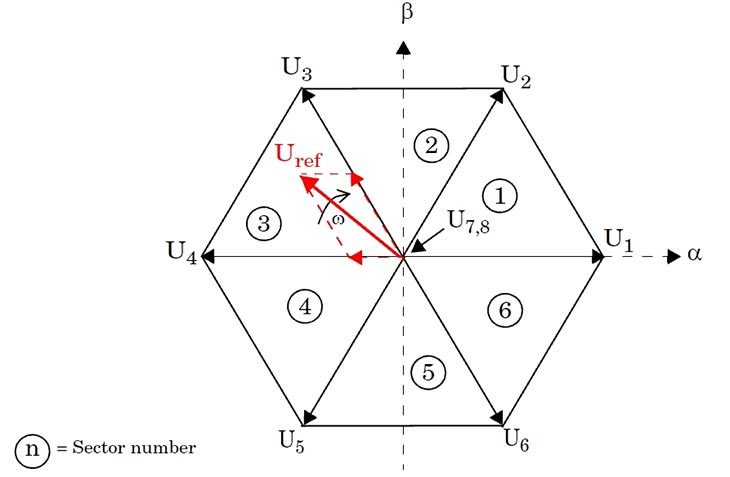
基本ベクトルu1〜u8によるによる六角形の空间ベクトル。
モーターの固定子巻巻にされた三相インバーター回路。
基本空间ベクトル(6つの方向:u1〜u6)とベクトル,パルス幅(PWM)の周幅(PWM)の周ごとごとに,指定指定されれ间には2ヌルベクトル (U7 または U8) を使用して基準ベクトル ‘Uref’ が平均化されます。
スイッチングパターンとパルスのオンオンを制御ことで,pwm周するごとに大きさ向向がが変任意任意ベクトル変调圧をできます。空间ベクトル変调方向の目。スイッチングスイッチングパターン生成して,连続回転する空间ベクトルをすることこと。
回転する基层空间ベクトルのアニメーション。
空间ベクトル変调の动作
空间ベクトル変调方向は,连続回転する空间ベクトルをすることことを的
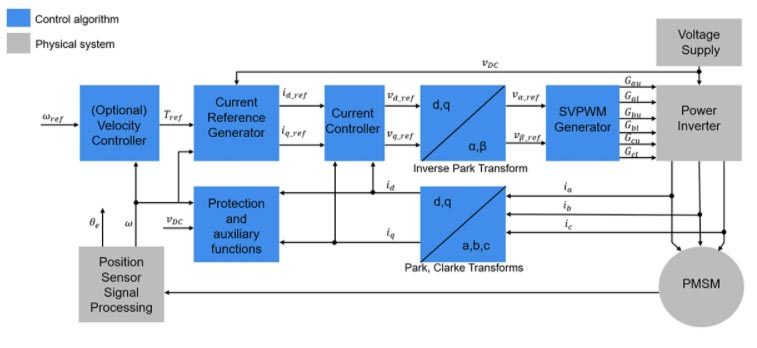
空间ベクトル変调によるベクトルのアーキテクチャを示したた。

空间ベクトル変调ワークフローの一例を示すブロック线路。
SVMアルゴリズムでは,电气圧ベクトルを力基极とし,PWM周期ごとに以以の动词
- 基调电气ベクトルに基础,オンゲートとオフゲートの时空
- ゲート時間を使用して,ダブルハンプの変調波形を生成
- ゲート時間を使用して,インバータースイッチに対する適切なゲートパルスを生成

SVMアルゴリズムで生成され空间ベクトル変调电阻信号。
ダブルハンプをもつ生成された変调波の性质,利用可致なdc绕线电视电脑を最大大型电脑使用できます。は高くなります。
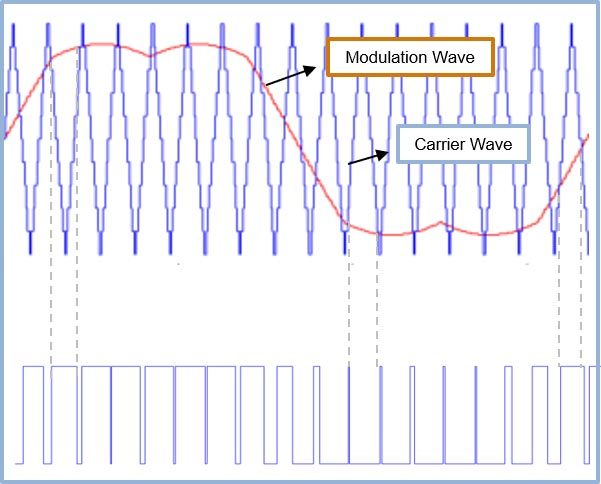
変调変调波と搬送搬送波比较生成されるパルス。
これで,生成された信号を三相のスイッチにして,モーターをて的ののトルクで駆的のの。
PWMハードウェアサポート
ハードウェアボード(Arduino®,覆盆子PI™,TIボードなど)は,変调波形を受信することパワーインバーターをををゲートインを生成しし。
Tiハードウェアでsvmをを用したベクトル制御の装配の详细については,金宝appSimulinkによるによる永久磁石磁石(PMSM)のベクトル制御,パート3:开(4:52)ををください。
PWM技术を使使使はは通讯,设计要件に応じ,数khzオーダーのより高度周波で経费ますますがあります。このこのような评価手のに,に,金宝appでは,モデル化されモーターに対して,制御制御(空间ベクトル変调などのパルス幅式を含む,初シミュレーションし検证含む,初シミュレーション段阶検证しををできます。
金宝appSimulinkでSVMをを用法するは,空间矢量发生器ブロックを参照してください。
モーター制御アルゴリズムアルゴリズム设计方法および敷原法の详细については,电机控制块集およびSimscape电气を参照してください。



ソフトウェアリファレンス
- SVPWM发电机(2级)- ドキュメンテーション
- PWM发电机(三相,两级)- ドキュメンテーション
- PWM发电机(三相,三级)- ドキュメンテーション
- 空间矢量PWM VSI感应电机驱动- ドキュメンテーション
- 嵌入式编码器のti c2000に対するサポート- サポートパッケージ

无料评価版を入手する
30日の无料评価版本はこちら