电脑视觉工具箱
컴퓨터비전,3D비전및비디오처리시스템을설계하고테스트할수있습니다。
电脑Vision Toolbox™는는비전,3D비전,비디오처리시스템을설계테스트위한알고리즘,함수,앱을제공。3d비전을위해이툴박스는는,스테레오,어안카메라보정,스테레오스테레오,3d재구성,라이다3d포인트클라우드처리를합니다합니다。컴퓨터컴퓨터앱을통해에이터레이블레지정과카메라보정보정를할수수수수수수수
yolo v2,更快的r-cnn,acf등의딥러닝및머신러닝을이용하여사용자지정지정객체검출기를학습할수수객체검출기를학습할수수。의미론의미론적분할Segnet,U-Net,Deeblab등의딥러닝알고리즘사용할할수。사전훈련된모델로얼굴,보행자,기타일반객체를검출할수있습니다。
멀티코어프로세서와GPU에서실행하여알고리즘의속도를높일수있습니다。대부분의툴박스알고리즘은기존코드와의통합,데스크탑프로토타이핑,임베디드비전시스템배포를위해C / C ++코드생성을지원합니다。
시작하기:

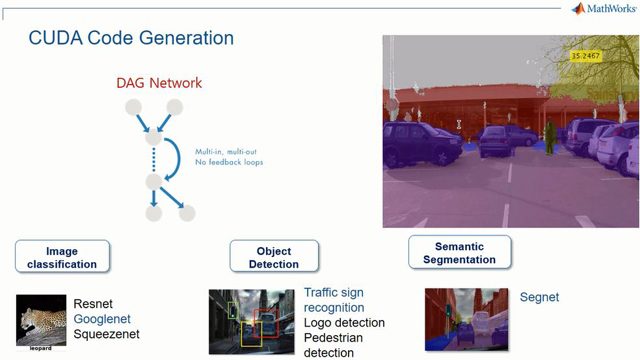
객체검출및인식
YOLO V2,更快的R-CNN,ACF,维奥拉 - 琼斯등객체검출기를학습,평가,배포하기위한프레임워크입니다。객체인식기능에는BoVW(시각적단어가방)와OCR이포함됩니다。사전훈련된모델로얼굴,보행자,기타일반객체를검출할수있습니다。


更快的R-CNN을이용한객체검출
의미론적분할
SegNet,FCN,掌中宽带,DeepLab V3 +등의신경망을이용하여개별픽셀과복셀을분류하여영상과3D볼륨을분할할수있습니다。

지상실측데이터레이블지정
视频贴标와图片标注앱을사용하여객체검출,의미론적분할,장면분류에서레이블지정을자동화할수있습니다。

视频贴标앱을사용한지상실측데이터레이블지정。
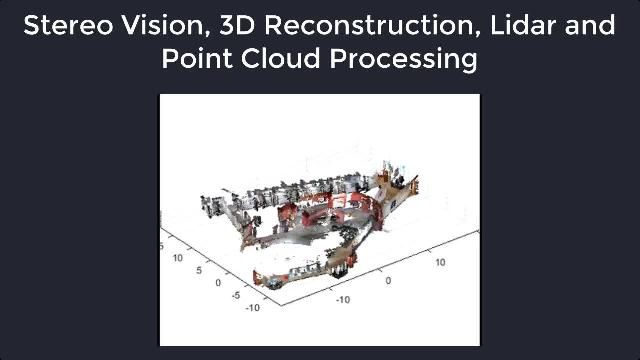
라이다및3D포인트클라우드처리
라이다또는3D포인트클라우드데이터로기하학적형상에대해분할,군집,다운샘플,노이즈제거,정합,피팅을수행할수있습니다。激光雷达工具箱™은은이다처리처리시스템을,분석,테스트하기위한추가기능기능제공합니다。

포인트클라우드정합
NDT(普通-分布变换),ICP(迭代最近点),CPD(相干点漂移)알고리즘을이용하여3D포인트클라우드를정합할수있습니다。

일련의포인트클라우드정합및스티칭。
분할과형상피팅
포인트클라우드를클러스터로분할하고기하학적형상을포인트클라우드에피팅할수있습니다。자율주행과로봇공학응용분야를위해라이다데이터의지상평면을분할할수있습니다。

분할된라이다포인트클라우드。

스테레오카메라보정
스테레오스테레오보정하여이를계산하고3d장면장면재구성할수있습니다。

立体相机校准앱。
3D비전
움직임움직임과시각적적주행측정에서나온나온

움직임의다시점구조。

상대적깊이를나타내는스테레오시차지도。
특징검출,추출,매칭
다수다수의영상에서,모서리,코너등흥미로운특징들검출,추출하고매칭할있습니다。

점특징검출,추출,매칭을이용하여혼잡한장면에서객체검출하기。
특징기반영상정합
다수의영상에걸쳐특징들을매칭시켜서영상간에기하학적변환을추정하고영상시퀀스를정합할수있습니다。

특징기반정합으로만든파노라마。
객체추적
비디오시퀀스에서프레임별로객체궤적을추적할수있습니다。

점선으로추적하는객체의궤적을나타냅니다。
움직임추정
광학흐름,블록매칭,템플릿매칭을사용하여비디오프레임간의움직임을추정할수있습니다。

고정카메라로움직이는객체검출。

코드생성
툴박스함수,클래스,시스템객체,블록에대한C / C ++,CUDA코드,MEX함수를생성할수있습니다。