NXT LEGO Mindstorms NXT圆球机器人是一个版本的圆球机器人由拉尔夫·霍利斯卡内基梅隆大学开发的。圆球机器人的目的是平衡本身在其单一球形轮旅行时。请参考以下网址了解更多关于圆球机器人的详细信息。
http://en.wikipedia.org/wiki/Ballbot
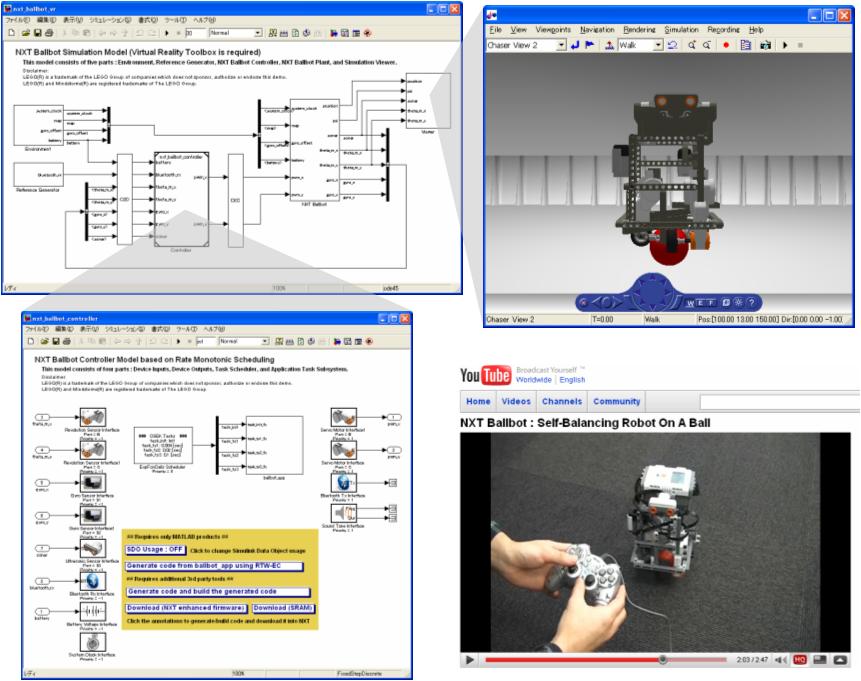
这个演示展示了示例模型和文档描述以下内容。
如何构建NXT圆球机器人吗
数学NXT圆球机器人的动力学模型
平衡和驱动控制的控制器设计
NXT圆球机器人模型说明
仿真和实验结果
你可以模拟NXT圆球机器人模型并生成控制器程序,可以在NXT执行。此外,你可以看电影NXT圆球机器人的仿真和控制实验在下列URL。
http://www.youtube.com/watch?v=1MfiAZBsWac
http://www.youtube.com/watch?v=f8jxGsg3p0Y
这个演示需要嵌入式编码器NXT机器人演示MBD环境。您需要下载它从以下URL之前尝试这个演示。
//www.tatmou.com/matlabcentral/fileexchange/13399
《免责声明》
乐高(R)是一个商标的乐高集团公司不赞助,授权或认可这个演示。乐高(R)和头脑风暴(R)是乐高集团的注册商标。
引用作为
山本Yorihisa (2023)。NXT圆球机器人(一个球)自平衡机器人控制器的设计(//www.tatmou.com/matlabcentral/fileexchange/23931-nxt-ballbot-self-balancing-robot-on-a-ball-controller-design), MATLAB中央文件交换。检索。
MATLAB版本兼容性
创建R2007b
兼容任何释放
平台的兼容性
窗户 macOS Linux标签
nxt_ballbot /模型/
nxt_ballbot /模型/
| 版本 | 发表 | 发布说明 | |
|---|---|---|---|
| 1.0.0.0 |