
NXT SCARA是LEGO MINDSTORMS NXT建立了一个双连杆平面机器人臂。SCARA代表选择符合大会机械臂。请参考以下网址了解SCARA更详细的信息。
http://en.wikipedia.org/wiki/SCARA
这个演示展示了示例模型和描述以下内容的文档。
如何构建NXT SCARA
几何模型和反向运动学
轨迹制作
控制器设计跟踪控制
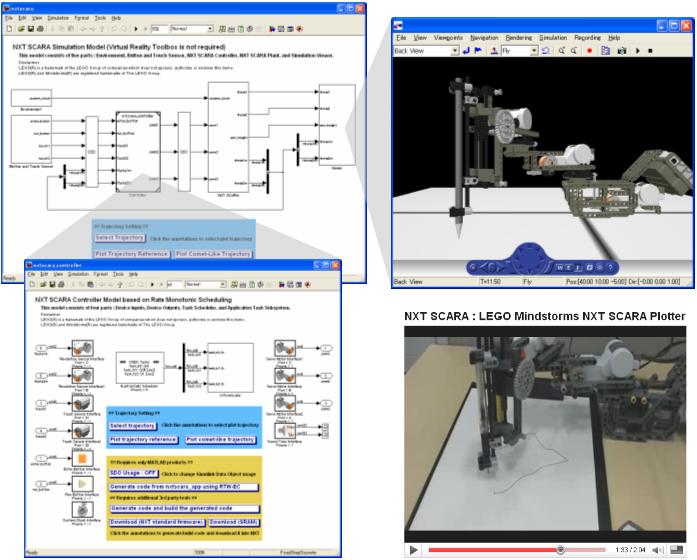
NXT SCARA模型插图
仿真和实验结果
您可以模拟NXT SCARA模型,并生成可在NXT执行控制器程序。此外,您可以通过以下网址观看NXT SCARA仿真和控制实验电影。
http://www.youtube.com/watch?v=kanmZErt4io
http://www.youtube.com/watch?v=7F2H19teyMY
该演示需要嵌入式编码NXT机器人的演示环境MBD。您需要在尝试此演示之前从以下网址下载。
//www.tatmou.com/matlabcentral/fileexchange/13399
<免责声明>
乐高(R)是乐高集团公司的商标,不赞助、授权或认可本演示。乐高(R)和Mindstorms(R)是乐高集团的注册商标。
引用作为
Yorihisa山本(2020)。NXT SCARA(双连杆平面机器人手臂)控制器设计(//www.tatmou.com/matlabcentral/fileexchange/22126-nxt-scara-two-link-planar-robot-arm-controller-design),MATLAB中央文件交换。检索。
评论和评级(7)
更新
| 1.4.0.0 | 新增日语文档 |
|
| 1.2.0.0 | 修改后的文档略 |
nxtscara /模型/
nxtscara /模型/
也可以从以下列表中选择网站:
费德里卡(查看配置文件)
嗨,没用。为什么?
南沃昂(查看配置文件)
路易斯·卡塞雷斯(查看配置文件)
由于隆我已经让它工作,主要的问题是,MATLAB / SIMULINK 2012A请求通过“ECRobotInstaller - 简化安装金宝app”添加NXT的支持,以便识别所有文件,在安装目录后,还需要金宝app“Simulink.data.upgradeClasses”命令更新后所有的系统是当它工作
隆亲政(查看配置文件)
嗨路易斯,
该错误是通过在2012A Simulink的数据对象的变化引起的公知的一个金宝app
正如MATLAB命令窗口所说,
>> 金宝appSimulink.data.upgradeClasses
并重新启动MATLAB会解决这个问题。
路易斯·卡塞雷斯(查看配置文件)
prety复杂的设计,只是在Simulink模型给我一个错误的MATLA金宝appB / simulink2012
块错误EnterButton接口错误evaluating'InitFcn“回车按键接口块(掩模)的回调” nxtscara_controler /输入
型号未知错误未定义的函数或变量“NXT.Signal”
同样的错误了所有的接口,
普莱舍一些帮助
贾米尔alabdaly(查看配置文件)
谢谢
为帮我下载
穆罕默德(查看配置文件)
实际上它是一个完美的事情,工作,我想非常感谢你为它发布