NXT Ballbot(自我平衡的机器人球上)控制器设计
1.0.0.0版(11.7 MB)通过
Yorihisa山本


- 7个文件
- 74个下载
基于嵌入式编码机器人NXT NXT Ballbot基于模型的设计。
NXT Ballbot是一款乐高Mindstorms NXT版本的Ballbot,由卡内基梅隆大学的Ralph Hollis开发。Ballbot的设计目的是在它的单个球形轮子上平衡自己。请参考以下网址,了解更多关于鲍尔伯特的详细信息。
http://en.wikipedia.org/wiki/Ballbot
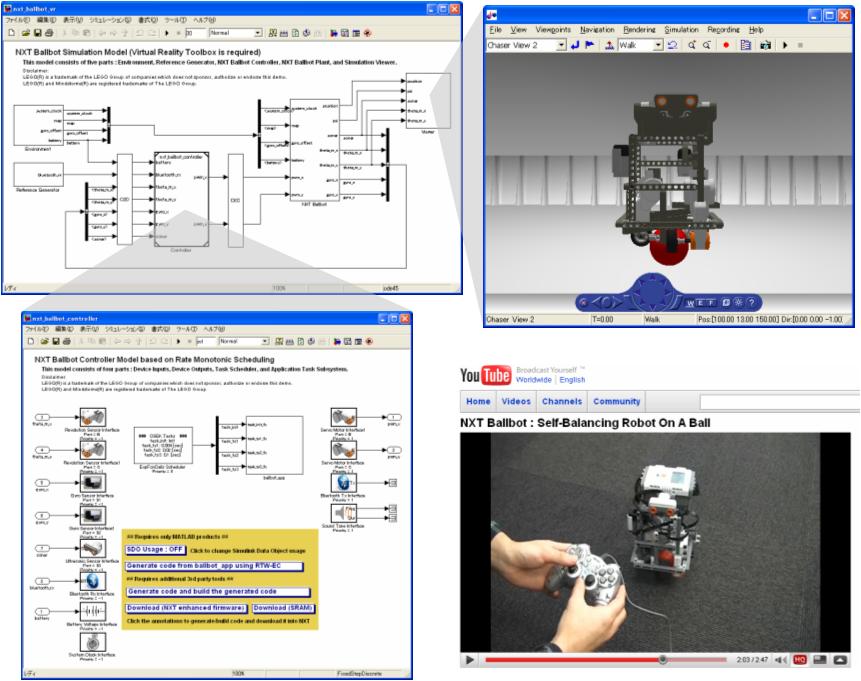
这个演示展示了示例模型和描述以下内容的文档。
如何建立NXT Ballbot
NXT-Ballbot的数学动力学模型
控制器设计用于平衡和驱动控制
NXT Ballbot型号示例
仿真和实验结果
您可以模拟NXT Ballbot模型,并生成可在NXT执行控制器程序。此外,您可以通过以下网址观看NXT Ballbot仿真和控制实验电影。
http://www.youtube.com/watch?v=1MfiAZBsWac
http://www.youtube.com/watch?v=f8jxGsg3p0Y
该演示需要嵌入式编码NXT机器人的演示环境MBD。您需要在尝试此演示之前从以下网址下载。
//www.tatmou.com/matlabcentral/fileexchange/13399
<免责声明>
LEGO(R)是一种不赞助,授权或认可本演示公司乐高集团的商标。LEGO(R)和头脑风暴(R)是乐高集团的注册商标。
引用作为
Yorihisa山本(2020)。NXT Ballbot(自我平衡的机器人球上)控制器设计(//www.tatmou.com/matlabcentral/fileexchange/23931-nxt-ballbot-self-balancing-robot-on-a-ball-controller-design),MATLAB中央文件交换。检索。
评论和评级(7)
MATLAB版本兼容性
用R2007b创建
与任何版本兼容
平台兼容性
窗户 苹果系统 Linux的标签
nxt_ballbot/型号/
nxt_ballbot/型号/
您还可以选择从下面的列表中的网站:
江武(查看资料)
请你提供新的P档的版本,因为这个人是无法在近期发布的MATLAB运行旧版本。提前致谢
JeongMo金(查看资料)
谢谢!
瓦姆西·克里希纳Mamidi(查看资料)
当我运行你的模拟我收到以下错误。你能说出它可能是错的“nxt_ballbot_sfun.bat”不被识别为一个内部或外部命令,
运行的程序或批处理文件
多米尼克九里(查看资料)
洛伦佐·加西亚(查看资料)
军刀(查看资料)
皮奥特泽卡尔斯基(查看资料)
伟大的榜样。
作品近乎完美 - 我已经能够创造我们大学的机器人实验室和测试一个 - 还需要一些调整,多半是因为陀螺仪传感器的偏移我的猜测。反正非常壮观的一个;-)。
感谢你的分享!