编者按:这个文件被选为MATLAB中心本周精选
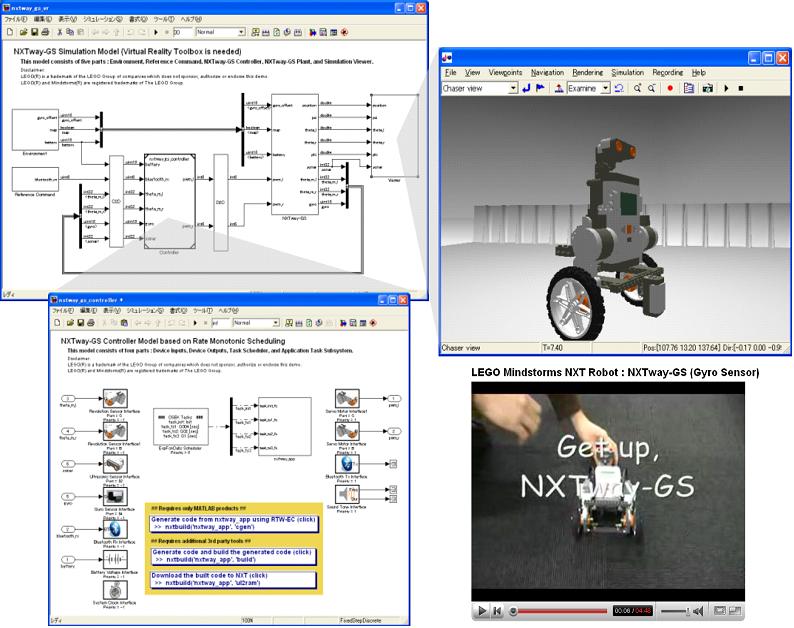
NXTway-GS是一款两轮自平衡机器人,由乐高Mindstorms NXT和Hitechnic陀螺传感器组成。本演示展示了描述以下内容的示例模型和文档。
如何构建NXTway-GS
NXTway-GS的数学动力学模型
平衡和驱动控制的控制器设计
NXTway-GS模型说明
仿真与实验结果
您可以模拟NXTway-GS模型,生成可以在NXT上执行的控制器程序。NXTway-GS模拟和控制实验的电影可以在下面的URL中观看。
http://www.youtube.com/watch?v=EHPlGTLQHRc
http://www.youtube.com/watch?v=4ulBRQKCwd4
本演示使用Embedded Coder Robot NXT demo作为MBD环境。在尝试这个演示之前,您需要从下面的URL下载它。
//www.tatmou.com/matlabcentral/fileexchange/13399
<免责声明>
乐高(R)是乐高集团公司的商标,不赞助、授权或支持本演示。乐高(R)和Mindstorms(R)是乐高集团的注册商标。
引用作为
山本Yorihisa(2021)。NXTway-GS(自平衡两轮机器人)控制器设计(//www.tatmou.com/matlabcentral/fileexchange/19147-nxtway-gs-self-balancing-two-wheeled-robot-controller-design), MATLAB中央文件交换。检索.
意见及评分(31)
MATLAB版本兼容性
平台的兼容性
窗户 macOS Linux标签
确认
启发:嵌入式编码器机器人NXT演示,NXT SCARA (Two-Link Planar Robot Arm)控制器设计,NXT Ballbot(球上自平衡机器人)控制器设计
启发:乐高Mindstorms EV3 Gyroboy,陀螺男孩-基于乐高EV3的自平衡两轮机器人,嵌入式编码器机器人NXT演示,NXT SCARA (Two-Link Planar Robot Arm)控制器设计,NXT Ballbot(球上自平衡机器人)控制器设计,虚拟乐高实时目标,NXTbike-GS(转向摔倒自平衡自行车机器人),NXT-LTD:线跟踪舞蹈机器人演示
nxtway_gs /模型/
nxtway_gs /模型/
你也可以从以下列表中选择一个网站:
谢谢,先生,这对我理解概念有很大帮助
你好。我碰到了这个?怎样才能解决呢?
Failed to load library 'ecrobot_nxt_lib' referenced by 'nxtway_gs_controller/Battery Voltage Interface'
Failed to load library 'ecrobot_nxt_lib' referenced by '
组件:Simulink金宝app |类别:阻塞错误
需要升级到R2017B版本。
谢谢!
是否可能我还没有将NXTway-Gs连接到我的PC上,因为我只是想在我的PC上做一个模拟…?
无法打开模型文件nxtway_gs_controller.mdl。
我有一个问题,在两个一般化
你选择的坐标。第一个是θ:左右轮平均角,为什么你认为它等于1/2(θ R +θl),第二个是φ:身体偏转角,为什么你认为它等于R/W*(θ R -θl)。这两个广义的坐标已经困扰了我好几天了,我为它感到非常苦恼。请您解释一下这两个等式。广义坐标的进一步?
无法加载块图'ecrobot_nxt_lib'
为什么? ?
你好!谢谢你的工作。
我有一些问题,它对我不起作用。我有一个matlab R2013。
当我运行simulink文件“金宝appnxtway_gs_vr. txt”。Mdl ",它有错误:
评估“InitFcn”电池电压接口块(掩码)回调的错误“nxtway_gs_controller /电池电压接口”。
引起的:
未定义函数或变量'NXT.Signal'。
有人知道怎么修吗?请帮助我,非常感谢
谁能告诉我,我需要做什么修改来使用乐高小轮子?
谢谢你!
菲利普,你有没有发现观察者实施计划的事?
我尝试在simulink中模拟这个控制器,但我得到错误的陈述(源函数不存在)金宝app,如sfun_bt_tx, sfun_bt_rx, sfun_soundtone, sfun_expfcncallsscheduler。这很奇怪,因为在环境目录下下载ecrobotNXT时,它们确实存在于C文件中,并以.mexw32的形式存在。问题可能是我在X64位windows 7上运行这个?任何帮助都将非常非常感谢
菲利普,我已经完成了控制器成为两个动力学成为一个,并关闭环路控制在车轮动力学,但我计算的剩余状态从机载传感器。控制器可以跟踪线速度和角速度。但是观察者的想法是由Takachi在他早期的nxtWAY中提出的,他使用光传感器来确定状态(ecrobot的例子)。
你好,
有人为非测量状态实施了基于观察者的策略吗?顺便说一句,这是一项伟大的工作,但从现代控制理论的观点来看,基于观测器的方法会更好。
> Yorihisa山本
你好,我刚想说,一个人设计一个系统,如NXTway-GS的档案,你应该花一些时间来支持,留下了一些空的文档的事实,他们带我一段时间意识到控制机器人的方向是开环的。金宝app
你好,
我试图增强(扩展)控制NXTway的自治模式,这是通过实现纯追求算法实现的,该算法在选择这些选项时执行。
在模拟过程中,我发现有一些疑问:
1.为什么在计算机器人的当前位置时,你没有使用文档(1.1版)第7页的3.1方程?,但你可以用这个:
Z =积分(ttaot * R * cos()) +初始Z;
Y =积分(R sin) +初始Y
我知道你重新命名了机器人的坐标(第56章),但是尽管坐标改变了,我认为方程是不相等的。
2.正如我在param_controller文件中看到的。m的最大线速度是0.3 [m / sec],但是你没有把它和角速度等价,所以:如果我把游戏手柄phidot_ref=10,它和角速度等价多少?,我看到的是,你做的是增加和减去功率的电机(与最大25 pwm)。
非常感谢您的关注。提前感谢,任何你能给我的帮助,我很注意你的回答。
做得很好。良好的文档。这个演示给我看过的每个人都留下了深刻的印象。
>阿南德
这个文件是用Windows XP的“压缩(压缩)文件夹”快捷方式归档的。请尝试使用WinZip或其他工具解压。
我无法解压缩这个文件。请帮助
我在东京的嵌入式系统博览会上观看了这款自平衡两轮机器人。它看起来像一个骑着单轮脚踏车的小丑。我认为这个机器人对学生来说是一个快乐的学习案例。
它是优秀的模拟NXT机器人和文档是完美的。
不错的