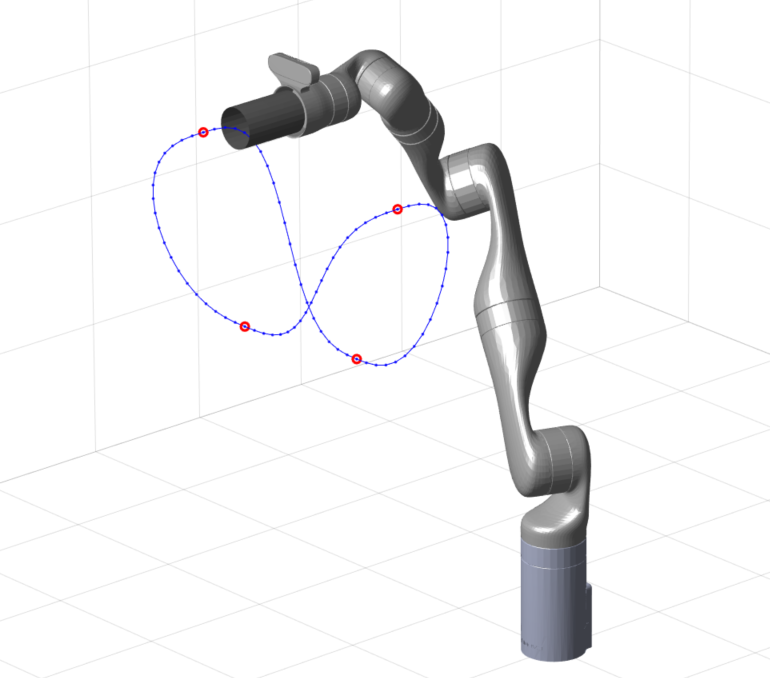
此提交由教育Matlab和Simulink示例组成,用于轨迹生成和机器人操纵器的评估。金宝app
所有示例都具有7-DOF Kinova Gen3超轻型机器人机械手:https://www.kinovarobotics.com/en/下载188bet金宝搏products/robotic-arms/gen3-ultra-lightweight-robot.
Kinova Gen3有一个预先保留的Matlab刚体刚体树模型;但是,你可以
从Kinova Kortex Github存储库访问3D模型描述:https://github.com/Kinovarobotics/ros_kortex
有关机器人系统工具箱功能的更多信息,
看到文档://www.tatmou.com/help/robotics/manipulators.html.
有关轨道规划的更多背景信息,请参阅以下内容:https://cw.fel.cvut.cz/old/_media/courses/a3m33iro/080manipulatortrajectorlanning.pdf.
如果您有任何疑问,请在roboticsarena@mathworks.com上发送电子邮件至我们。
引用
数学竞赛学生团队(2021年)。机器人操纵器的轨迹规划(https://github.com/mathworks-robotics/traptory-planning-robot-manipulators)github。检索到。
意见及评分(4.)
马铃薯
公用事业
金宝app
公用事业
您还可以从以下列表中选择一个网站:
好的