pidtune
线性对象模型的PID整定算法
语法
C = pidtune (sys、类型)
C = pidtune (sys, C0)
C = PidTune(SYS,类型,WC)
C = pidtune (sys, C0, wc)
C = pidtune (sys,…,选择)
[C,INFO] = PIDTUNE(...)
描述
C= pidtune (SYS.,类型)类型的植物SYS..如果类型指定一个单自由度(1-DOF) PID控制器,然后对单元反馈回路设计控制器,如图所示:

如果类型指定一个二自由度(2-DOF) PID控制器,则pidtune设计一个2-DOF控制器,如图所示:

pidtune调整PID控制器的参数C平衡性能(响应时间)和健壮性(稳定裕度)。
C= pidtune (SYS.,C0)C0.如果SYS.和C0离散时间模型,C有相同的离散积分公式吗C0.
C= pidtune (SYS.,类型,厕所)C= pidtune (SYS.,C0,厕所)厕所为开环响应的第一个0db增益交叉频率。
C= pidtune (SYS.,......,选择)pidtuneOptions指定选项集选择.
[返回数据结构C,信息] = pidtune(…)信息,其中包含有关闭环稳定性、所选开环增益交叉频率和实际相位裕度的信息。
输入参数
|
单输入,单输出动态系统模型用于控制器设计的植物。
如果植物有不稳定的极点
你必须使用 |
|
控制器类型的控制器设计,指定为字符向量。这个词控制器类型指控制器动作中存在哪些术语。例如,PI控制器仅具有比例和积分项,而PIDF控制器包含比例,积分器和过滤的衍生术语。 1-DOF控制器
二自由度控制器
有关一般二自由度PID控制器的更多信息,请参见两级自由度PID控制器. 具有固定设定值的2-DOF控制器
关于固定设定值权重的2-DOF PID控制器的详细信息,请参见PID控制器类型. 控制器形式当你使用 如果 有关PID控制器形式和公式的更多信息,请参见: |
|
PID控制器设置所设计控制器的属性,指定为a |
|
为调谐开环响应的0db增益交叉频率的目标值。指定 增加 |
|
选项设置为此指定其他调整选项 |
输出参数
|
控制器设计 控制器形式: 控制器类型:
然而,在任何一种情况下,算法都可以使用低阶控制器来实现比指定的低阶控制器的足够性能和鲁棒性 时间域: 如果您指定 |
|
数据结构,包含关于调谐PID循环的性能和鲁棒性的信息。等领域的 如果 |
例子
命令行PID控制器设计
这个例子展示了如何为给定的对象设计PID控制器:
作为第一次通过,创建工厂的型号并为其设计一个简单的PI控制器。
Sys = zpk([],[-1 -1 -1],1);[C_pi,信息]= pidtune (sys,“π”)
C_pi = 1 Kp + Ki *——s, Kp = 1.14, Ki = 0.454并联形式的连续时间PI控制器。
信息=结构体字段:稳定:1交叉频率:0.5205相位裕度:60.0000
C_PI.是A.pid控制器对象,表示PI控制器。等领域的信息结果表明,调谐算法选择了约0.52 rad/s的开环交叉频率。
检查被控系统的闭环阶跃响应(参考跟踪)。
T_pi = feedback(C_pi*sys, 1);步骤(T_pi)

为了提高响应时间,您可以设置比结果更高的目标交叉频率pidtune自动选择0.52。将交叉频率增加到1.0。
[c_pi_fast,info] = pidtune(sys,“π”, 1.0)
c_pi_fast = 1 kp + ki * --- s用kp = 2.83,ki = 0.0495以并行形式的连续时间pi控制器。
信息=结构体字段:稳定:1交叉频率:1相位裕度:43.9973
新的控制器实现了更高的交叉频率,但以减少相位裕度为代价。
比较两种控制器的闭环阶跃响应。
T_pi_fast =反馈(C_pi_fast * sys, 1);step(T_pi,T_pi_fast)轴([0 30 0 1.4])图例(“π”,“π,快”)

性能下降的原因是PI控制器没有足够的自由度来在1.0 rad/s的交叉频率下实现良好的相位裕度。添加一个衍生动作可以改善响应。
设计了一种pid控制器Gc目标交叉频率为1.0 rad/s。
[c_pidf_fast,info] = pidtune(sys,“PIDF”, 1.0)
C_pidf_fast = 1 s Kp + Ki *——+ Kd * -------- s Tf*s+1, Kp = 2.72, Ki = 0.985, Kd = 1.72, Tf = 0.00875并行形式的连续时间PIDF控制器。
信息=结构体字段:稳定:1交叉频率:1相位裕度:60.0000
信息领域表明,在控制器中的微分作用允许调谐算法设计一个更积极的控制器,以实现目标交叉频率与良好的相位裕度。
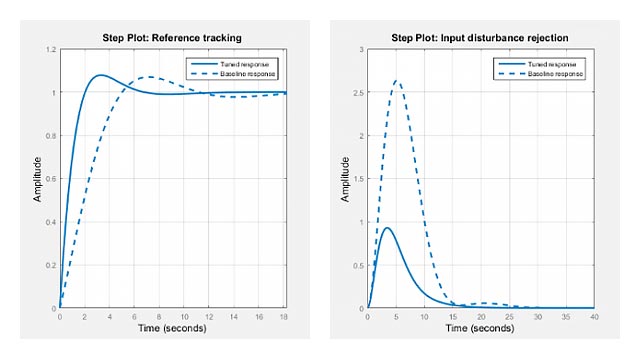
比较了快速PI和PIDF控制器的闭环阶跃响应和抗扰性。
t_pidf_fast =反馈(c_pidf_fast * sys,1);步骤(t_pi_fast,t_pidf_fast);轴([0 30 0 1.4]);传奇(“π,快”,'PIDF,快速');

您可以使用快速PI和PIDF控制器比较受控系统的输入(负载)干扰抑制。为此,请绘制从工厂输入到工厂输出的闭环传递函数的响应。
s_pi_fast =反馈(sys,c_pi_fast);s_pidf_fast =反馈(sys,c_pidf_fast);步骤(s_pi_fast,s_pidf_fast);轴([0 50 0 0.4]);传奇(“π,快”,'PIDF,快速');

这幅图表明,PIDF控制器也提供了更快的干扰抑制。
设计标准形式的PID控制器
为下列装置设计标准形式的PID控制器。
要设计标准形式的控制器,使用标准形式的控制器作为C0参数pidtune.
Sys = zpk([],[-1 -1 -1],1);C0 = pidstd (1 1 1);C = pidtune (sys, C0)
C = 1 1 Kp *(1 + ---- *——+ Td * s) Ti s具有Kp = 2.18, Ti = 2.57, Td = 0.642的标准形式的连续时间PID控制器
指定积分离散化方法
设计一个离散时间PI控制器,用指定的方法对积分器进行离散。
如果你的工厂是离散时间的,pidtune使用默认转发欧拉集成方法自动返回离散时间控制器。指定不同的集成方法,使用pid或pidstd创建具有所需集成方法的离散时间控制器。
Sys = c2d(tf([1 1],[1 5 6]),0.1);C0 = pid (1, 1,“t”, 0.1,“IFormula”,'背面灯');C = pidtune (sys, C0)
C = TS * Z KP + KI * ------ Z-1带有KP = -0.0658,ki = 1.32,ts = 0.1采样时间:0.1秒是并行形式的离散时间PI控制器。
使用C0作为输入原因pidtune设计控制器C相同的形式,类型和离散化方法C0.这个显示表明,的积分项C采用后向欧拉积分法。
指定梯形集成器并比较所得到的控制器。
C0_tr = pid (1, 1,“t”, 0.1,“IFormula”,“梯形”);Ctr = pidtune (sys C0_tr)
Ctr = Ts*(z+1) Ki * -------- 2*(z-1) with Ki = 1.32, Ts = 0.1
设计2-DOF PID控制器
为给定传递函数的被控对象设计一个二自由度PID控制器:
使用1.5 rad/s的目标带宽。
wc = 1.5;G = tf(1,[1 0.5 0.1]);C2 = pidtune (G,“PID2”,厕所)
C2= 1u = Kp (b*r-y) + Ki --- (r-y) + Kd*s (c*r-y) s with Kp = 1.26, Ki = 0.255, Kd = 1.38, b = 0.665, c = 0 Continuous-time 2-DOF PID controller in parallel form.
使用类型“PID2”原因pidtune生成一个二自由度控制器,表示为apid2对象。显示器确认此结果。显示屏也显示出来pidtune调整所有控制器系数,包括设定值权重b和c,以平衡性能和健壮性。
提示
算法
有关MathWorks的信息®PID整定算法,见PID优化算法.
选择
有关实时编辑器中的交互式PID调优,请参阅调整PID控制器住编辑任务。这个任务让您交互式设计一个PID控制器,并自动生成MATLAB代码为您的生活脚本。例如,请参见LIVE编辑器中的PID控制器设计
对于独立应用程序中的交互式PID调优,请使用PID调谐器.看到用于快速参考跟踪的PID控制器设计有关使用应用程序设计控制器的示例。
参考文献
Åström, k.j.和Hägglund, T。先进的PID控制,研究三角公园,NC:仪器,系统和自动化协会,2006年。
另请参阅
功能
应用程序
住编辑任务
对象
你也可以从以下列表中选择一个网站: