高动态驾驶场景下自动驾驶车辆的实时仿真环境
Thomas Herrmann,慕尼黑工业大学
迈克尔•Luthy Speedgoat
2018年5月,慕尼黑工业大学(TUM)的一组研究人员赢得了首届roboace人与机器挑战赛。TUM的自动驾驶软件堆栈管理环境感知、自动导航和轨迹跟踪。
无论何时开发自动驾驶系统,虚拟测试完全自动驾驶软件堆栈的能力都非常重要,同时还要依赖于车辆及其周围环境的高保真模拟。本次演讲介绍了一个基于可伸缩和可扩展硬件(利用集成软件解决方案)的半环硬件环境。
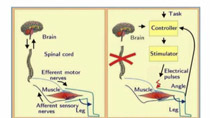
完全自动驾驶堆栈是在两个独立的硬件目标计算机模拟,模拟真实的技术设置Robocar-an NVIDIA®Drive™PX2和Speedgoat实时目标机。专为Simulink real-time™而设计的移动实时目标机,作为车辆的ECU,通过实时CAN控制器将中期所需轨迹转换为车辆执行器的即时命令金宝app。NVIDIA Drive PX2负责轨迹规划和传感器处理等任务。两个单元之间的通信由实时UDP处理。
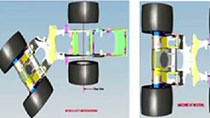
第二个Speedgoat目标机被用来模拟车辆动力学作为反应车辆的ECU的输入。这个实时模拟器还具有传感器和执行器模拟器,使软件认为它是在真实的数据流的现实世界中运行。物理和行为建模是用Simulink处理的金宝app®和Vehicle Dynamics Blockset™,使用Simulin金宝appk Real-Time再次实现实时目标的快速原型。
另外一个GPU服务器实现了赛道的环境模型,同时提供了完整的3D可视化。使用虚幻引擎中的关卡编辑器,可以很容易地创建一个真实世界的赛道的双表示®通过导入车辆传感器捕获的轨迹数据。
其他资源
相关视频和网络研讨会

















你也可以从以下列表中选择一个网站: