在这个视频中,我们要把我们学到的关于跟踪单个对象和扩大它跟踪多个对象。乍一看,它看起来不像这个问题是更加困难比跟踪单个对象。例如,我们不能把跟踪算法的IMM节和一个适用于每个对象,和做吗?嗯,你可能期望基于我问这个问题,答案是否定的,不是真的。至少,有一些额外的东西我们需要考虑与多目标跟踪,这就是我们要讨论在这个视频。所以我希望你留下来。我是布莱恩,欢迎来到MATLAB技术说话。
现在,我要强调一个大纲,以便您了解如何解决这些问题,但绝不是我想让你认为只有方式或一个算法来完成工作。每个问题都是不同的,因为他们有不同数量的对象,或者你可以访问不同的测量数据和信息,或不同的期望如何彼此亲密的对象,你会有不同的计算资源可以使用,或不同的需求准确的需要,等等。在某种程度上,如何解决特定的问题更多的是一种艺术而非科学。所以我希望你带走的东西从这个视频是理解类型的事情你应该知道在选择或开发您自己的算法对多目标跟踪和不一定如何解决你的具体问题。好的,足够的免责声明。让我们去得到它。
首先,让我们来谈谈什么使多目标跟踪困难,然后我们会圆回来,讨论如何解决这些问题的方法。
所有的问题我们会有源于不确定性。这是观察或检测的对象的不确定性和不确定性在我们的预测对象的路径。记得上次视频估计滤波器像卡尔曼滤波器的原理是测量混合不确定与不确定的预测。和我们看跟踪飞机雷达站。我们预测,飞机将在未来我们用噪声雷达测量修正它。而是一个对象,我们有很多对象,每个都有自己的不确定的预测与相应的不确定性,我们需要正确的测量。
所以,我们来到我们的第一个问题。我们不想正确预测使用测量另一个对象。但如果没有识别与检测信息,像飞机尾巴数量或其他独特的签名,我们如何知道哪一个对象我们刚刚发现?例如,如果所有的飞机我们跟踪雷达横截面相似,这是我们获得的所有信息,我们怎么能匹配一个任意平与适当的跟踪对象吗?
这不是太大的问题,如果所有的对象都是稀疏分布式和观测结果比较可靠。这将是一个简单的事情要求的对象的观察意见,这使得它最亲密的。在这种情况下,我们只需要测量到最近的对象分配和运行估计滤波器像我们当跟踪单个对象。
棘手的部分,然而,当物体接近对方,或者我们的不确定性是足够大的测量可能不止一个对象。现在我们有一些弄清楚。这是数据关联问题。我们必须把检测正确的对象。
好了,这是一个问题。我们需要考虑的另一件事是,被跟踪对象的数量不是固定的。有时候跟踪需要创建或删除基于我们观察。我们可以添加一个新的跟踪当飞机飞到雷达范围,同样我们可以删除一个跟踪当一个苍蝇。现在创建和删除并不仅仅发生在传感器的视场的边缘。我们可能不得不创建和删除跟踪。例如,飞机可能的雷达范围内土地或起飞。或者,正如另一个例子,如果一个无人驾驶汽车跟踪行人驱动一个繁忙的街道,人们必须意识到新和跟踪他们的行走方向进入视野的车,它不再关心它已经通过的行人。
所以我们需要考虑创建和删除对象的标准。和一个基本的方法是添加一个跟踪每当有不匹配现有对象的检测和删除跟踪如果没有检测到现有对象。复杂的东西,有时测量传感器假阳性。他们发现没有实际的东西。有时,传感器失败几次连续检测的对象实际上是。所以我们需要小心,这样我们没有创建跟踪过早,克拉特一家我们的看法是,我们没有删除跟踪过早,减少在第一时间跟踪的有效性。这是跟踪维护的问题。
这就是我们要讲的这个视频。跟踪多个对象时,有哪些方式方法数据协会,某种程度上我们可以解决跟踪维护什么?
这把我们带回到我短暂的流程图显示在这个视频的开始。虽然您的特定方法可能不会导致功能结构就像这样,它将为我提供一个方便的方式谈论的每个部分。让我们穿过它。
并开始在观察。一个观察对象可能包含测量量的范围,范围,或者视线。这些数量都是表示物体的运动性质。但观察也可能包含测量目标类型等属性,身份证号码和对象的形状。这就是我当我说你可能会早些时候暗示飞机的尾巴数量或其他识别信息的观察。得到一个尾巴数字数据协会是非常明确的,但其他类型的属性可能仍然需要一些解释。例如,您可能收集微多普勒雷达的波动从那可以确定飞机的类型你跟踪。和不确定性观测取决于两个物体之间的分离度。一架直升机从喷气式飞机看起来完全不同,因为大型旋转的螺旋桨,而一只鸟和一个四轴飞行器可能有类似的多普勒信号。
观察其他事情要考虑的是如果跟踪对象是一个点目标,然后观察会最多包含一个检测。所以我们必须将一个检测与一个对象相关联。但如果目标对象是大型和传感器有足够的分辨率,像激光一样,例如,可能有一个以上的每个目标检测时,我们需要考虑这个决定我们将如何处理将这些数据。同样,如果传感器的分辨率很低,那么有可能两个对象可能存在在一个检测。在这种情况下,两个对象都被观察到,所以我们不想停止跟踪他们但他们只显示为一个检测。我们跟踪删除算法将不得不处理这些情况。
未来在这个视频中,我们只会讨论的情况我们希望每个跟踪对象的一个检测,,这是处理的作业步骤,这将是下一个。
任务是匹配的过程跟踪对象的观察,或如果你对整个简洁,匹配跟踪。可能最简单的分配算法考虑的是GNN,全球最近邻。这只是分配一个追踪到最近的观察。但有趣的是,它并不是最近的欧几里得几何距离,但距离最近的概率就像你得到的距离。这是为什么。
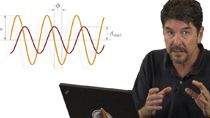
与一个概率分布,就像我们与我们的预测和测量,最低的欧几里得距离并不总是表明预测和测量是最适合的。这是因为我们更有信心在我们的预测和测量的标准偏差较低的方向。例如,在这个简单的图像,我们有一个预测两个不同的物体的位置和它们之间的一个谎言的检测。如果我们使用欧氏距离,我们假设对象的检测是2,因为它接近。但是如果我们看两个预测的概率分布,然后我们可以看到,更可能的是对象的检测是1。这就是距离确实对我们。距离归一化标准差。
现在,GNN适用于稀疏分布式对象,但凌乱对象的另一个任务像JPDA算法或者联合概率数据关联算法会更好。JPDA没有做出艰难任务之间的一个观察和跟踪。相反,它使所有的加权组合邻近的观察,仔细观察是加权高于进一步的。这是一个改善GNN因为如果有两个观察对象,JPDA不会完全承诺,可能错了。如果跟踪对象是集群相互靠近,和观察都聚集在他们附近,该算法可以处理,通过混合在一起而不是跳来跳去的几个错误的和正确的检测。
有更多的分配算法,您可以创建自己的根据你的跟踪情况。但底线是,你试图找出如何观察与跟踪。
并不是所有的观测得到分配,并不是所有的追踪观察。这就是跟踪维护的形式有删除和创建跟踪。但正如我之前所说的,我们必须要小心我们过早地什么都不做。让我们先从一个方法删除跟踪在一个保守的方式。对象而不是说一旦我们错过了一个观察,我们可以只删除跟踪记录没有被分配给一个检测至少过去R P乘以更新。在本例中,P, R参数,您可以调整您的情况。你可能会说删除跟踪如果还没有检测到至少四倍在过去六更新。
现在,创建一个跟踪有点棘手,因为你不知道一个未赋值的观察是一个新对象,但你仍然要注意它,这样你就可以算出随着时间的推移是否值得跟踪。处理这个问题的一个方法是创建一个试探性的轨,你维护和假装这是一个真正的对象但是你不真的相信是一个真正的对象。你只是在后台维护,跟踪。一旦初步跟踪被发现过去N M乘以更新,然后你将跟踪确认,这意味着你认为这是一个真正的对象。你可以删除一个试探性的跟踪与相同的逻辑删除跟踪确认。所以在这种方式,你可能有几十个初步跟踪维护由于假阳性的测量,但删除之前他们甚至成为证实。
与跟踪创建和删除和分配的观察,我们可以运行一组估计过滤器。这部分是相同的单一对象跟踪我们的选择,就像交互多模型滤波器或单一模型的卡尔曼滤波器。预测状态的每个跟踪对象分配一个观察(试探性的和确认对象)得到更新与各自的观察,然后重新开始整个过程。我们得到更多的观察,他们被分配到跟踪,跟踪创建和删除,再次运行和过滤器。
然而,它将计算愚蠢的看每一个观察和考虑可能是分配给每一个轨道。因此,我们可以选择忽视观察每个跟踪定义区域之外。这叫做浇注的筛选机制,确定哪些检测是有效的候选人看作业,哪些应该被忽略。例如,JPDA,这种观察是一个远的距离跟踪对象将统计总体解决方案的贡献非常少,所以为什么花甚至计算这个极小的数量的计算资源吗?特别是如果你追踪数十或数百个对象,这可能是极其浪费的。忽视观察外面的一个特定的地区,外门,我们可以加快作业过程。
所以控制分配算法,这样他们只考虑影响观测结果,值得一看。好了,这就是我要离开这个视频,但是在我结束之前,我想很快给你看个例子在MATLAB的结果显示两种不同的多目标跟踪算法。
在这个例子中,有两个对象移动相互独立的,我们通过跟踪雷达观察。黑色的三角形是真正的对象和圆圈的位置有什么发现雷达站。注意,当两个物体互相接近,检测重叠,很难告诉对象在这一地区的歧义。这是我们必须的数据,所以我们试算法,看看他们如何做。
第一个,我使用全球最近邻数据关联和估计的IMM滤波器因为这些对象是操纵。注意,当对象相互远离,很明显这对象和检测一起去,GNN算法做了很好的工作。对象分配给跟踪1和2分配跟踪对象。这就是GNN擅长,匹配时稀疏数据和跟踪对象。但是当相互接近的对象,它不会这样做。你可以看到一个跟踪被删除和添加了一个新的跟踪几个检测后,所以该算法有困惑,有多少对象。事实上,它从轨道2号跟踪数字8,这意味着有五个初步跟踪,这是维持之前确认第六人,追踪8所示。
让我们升级任务算法联合概率数据关联算法,看看这票价更好。
嗯,这很有趣。两个通过整个机动跟踪维护,但在模棱两可的地区仍有比其他地方更多的错误。但这是可以预料到的,因为这个地区的数据重叠。令人惊讶的是,这些算法可以把任何东西从这样的一个情况。现在,有额外的成本在复杂性JPDA GNN,所以值得评估你的需求是什么,而不仅仅是实现最精确和复杂的算法。如果对象总是远离对方,然后我希望简单GNN方法因为它发挥的作用很好,在这种情况下,更容易理解和实现。
这是类型的总体要点的东西我们需要考虑时,我们需要解决的各种问题跟踪多个对象。我想再次强调,没有实现这个目标的方法之一。它是完全依赖于每一个独特的情况。但是希望这个概述你将更好地了解如何解决你的下一个多目标跟踪问题。
好吧,如果你不想错过下一个科技视频说话,别忘了订阅这个通道。同样,如果你想看看我的通道,控制系统讲座,我覆盖更多的控制理论主题。谢谢收看。下次再见。