利用MATLAB和Arduino对电机进行控制
Madhu戈文达拉扬,MathWorks
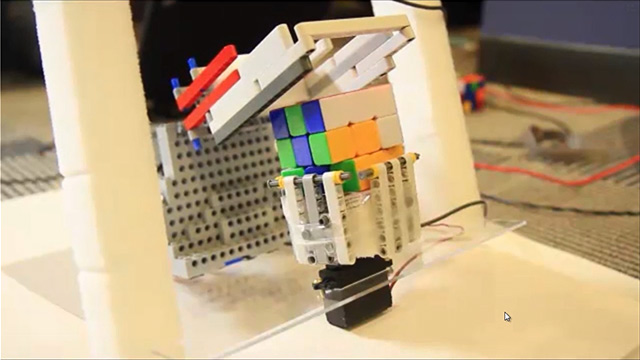
这个动手教程展示了如何从MATLAB命令®金宝appArduino支持包®可用于控制直流、步进和伺服电机。我们使用Adafruit Motor Shield V2和Arduino Due与MATLAB,并通过一系列MATLAB命令显示这些电机的行动。
在本演示中,我们将看到如何使用Arduino的MATLAB支持包控制电机。对于软件,我在我的机器上预装了Arduino的MATLAB和MA金宝appTLAB支持包。如果您没有安装支持包,可以转到“附加组件”选项卡,单击“获取硬件支持包”下载并安装支持包对于硬件,我有Arduino Due,Arduino的马达党包,直流电池包和USB Micro-b电缆。
为了跟随本演示并进行连接,请将电机护罩上的伺服1引脚连接至伺服电机。将一个引脚连接至直流电机,将M3和M4引脚连接至步进电机。需要注意的是,直流电池组是控制直流电机和步进电机所必需的。将直流电池组连接至e电源引脚。电缆的Micro-b端需要连接到到期日的编程端口,USB端需要连接到安装了MATLAB的PC。有关如何进行连接的详细说明,请遵循此链接。
现在,我们已经完成了所有必要的连接,让我们转到MATLAB,看看如何控制电机。为此,我编写了一个脚本,我将演示。该脚本中的Arduino函数与第一个输入中提到的com端口上断开的Due建立连接。该函数还为MATLAB提供了需要包含在Arduino服务器代码中的库。当我在MATLAB命令窗口中执行此命令时,MATLAB创建了一个表示它所连接的物理对象的对象。
然后,附加函数可以操作为连接Motor Shield而创建的对象。在命令窗口中执行命令和运行MATLAB脚本具有相同的效果。在接下来的视频中,我将使用这个按钮在执行完当前部分后跳转到代码的下一部分。
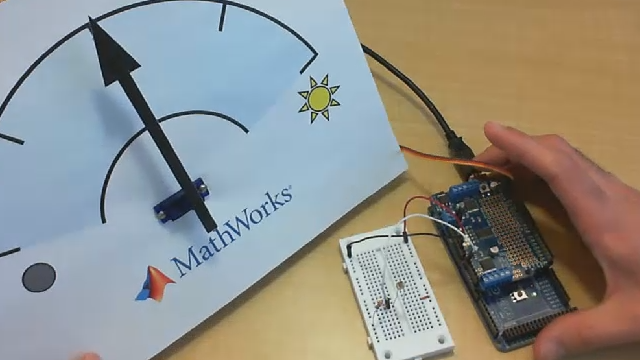
MATLAB每次连接到一个新的物理对象时,都会在工作空间中创建一个新对象。在这种情况下,电机屏蔽。在这一节代码中,Servo和right position函数是我们需要注意的。伺服功能可以让您从MATLAB与伺服电机通信,该伺服电机连接在第二个输入中提到的端口号。正确的位置功能允许您命令伺服电机移动到上述位置。这里,我用一个4环来移动电机从0到180度来回5次。我在这里附上了一个轮子的图像到伺服电机,以显示它的行动。
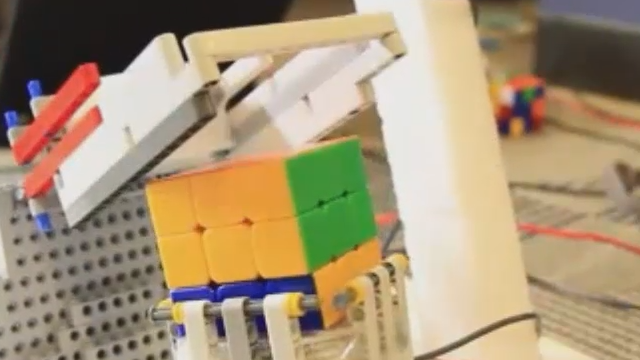
在Cord的下一节中,步进器功能帮助我们建立与连接在端口2的步进电机的连接。这个函数的第三个输入指定了步进电机在每一转中必须采取的步数。Move函数命令步进电机移动第二个输入中提到的步数。让我们看看MATLAB是否能让芭蕾舞者随着它的曲调起舞。
为了与来自MATLAB的motor Party Pack的最后一种电机进行通信,可以使用直流电机功能。stop和start注释所做的正是其名称所暗示的。记住,这些功能只能在提到电机的转速后才能使用。电机的速度必须作为电机最大速度的百分比值提到。这里的催眠盘显示了直流电机的工作。
通过这些,我们已经看到了如何使用MATLAB和Arduino的支持包来控制电机。金宝app
产品集中
其他资源
相关视频和网络研讨会












你也可以从以下列表中选择一个网站: