主要内容
数字滤波器的分析
幅度,相位,脉冲,和阶跃响应,相位和群延迟,极点零分析
分析滤波器的频域和时域响应。在复平面中可视化滤波器极点和零点。
应用程序
| 滤波器设计 | 从算法选择开始设计过滤器 |
功能
过滤器可视化工具
| FVTool | 过滤器可视化工具 |
主题
计算和显示IIR和FIR低通、高通和带通滤波器的频率响应。
提取滤波器的相位响应。
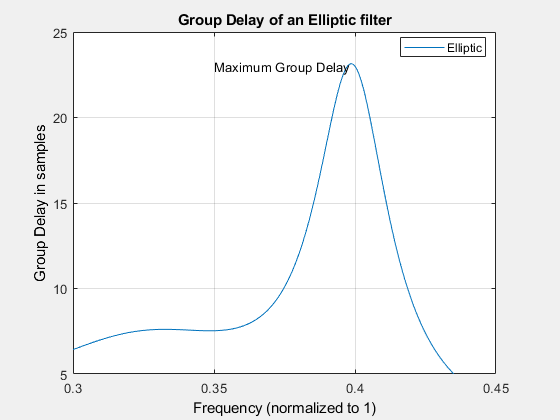
测量滤波器的平均时延作为频率的函数。
找出并形象化一个线性系统的极点和零点。
生成并显示一个简单滤波器的脉冲响应。
使用索引来抵消滤波引入的时移。
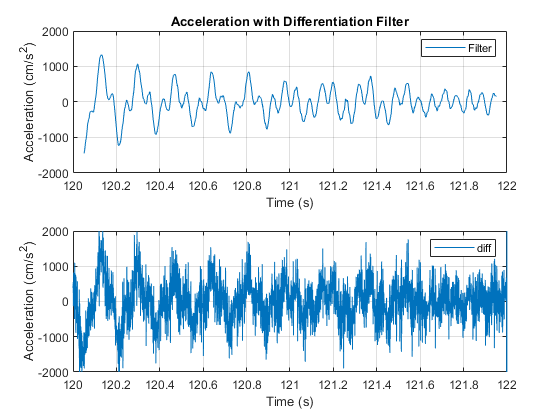
在保持相位信息完整的关键时刻,消除滤波带来的延迟和失真。
特色的例子

你也可以从以下列表中选择一个网站:
