的地方
极点配置设计
描述
极点配置的方法计算最优增益矩阵用于指定闭环极点指定位置,从而确保系统的稳定性。闭环极点位置有直接影响的时间响应特性如上升时间、沉淀时间,瞬态振荡。有关更多信息,请参见杆位置。
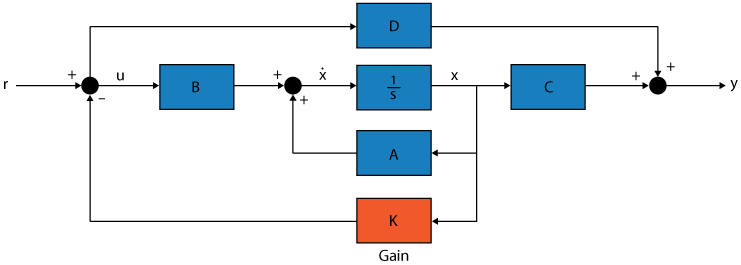
从图,考虑线性动态系统状态方程的形式
对于一个给定的向量p所需的自共轭的闭环极点位置,的地方计算一个增益矩阵K这样的状态反馈u= -Kx波兰人在位置的地方p。换句话说,特征值一个- - - - - -汉堡王将匹配的条目吗p(排序)。
例子
为二阶系统极点配置设计
对于这个示例,考虑一个简单的二阶系统状态矩阵如下:
输入矩阵和创建系统状态方程。
一个= [1、2、1、0];B = [2; 0];C = [0, 1];D = 0;sys = ss (A, B, C, D);
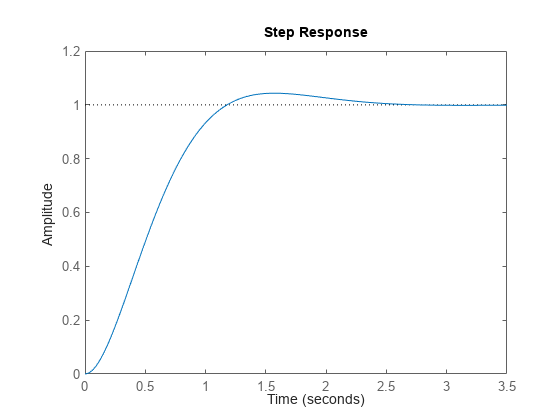
计算出开环极点并检查开环系统的阶跃响应。
波尔=杆(系统)
波尔=2×1复杂我-0.5000 - 1.3229 -0.5000 + 1.3229
图(1)步骤(系统)在;
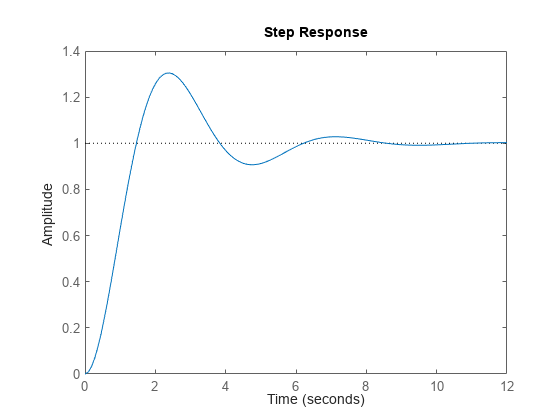
请注意,这里有一个不稳定的钢管,合成系统阻尼不足的。因此,选择真正的极点在复平面的左半部分消除振荡。
p = [1, 2];
找到增益矩阵K利用极点配置和检查的闭环极点syscl。
K = (A、B、p);Acl = a - b * K;syscl = ss (Acl, B, C, D);Pcl =杆(syscl)
Pcl =2×1-2.0000 - -1.0000
现在,将闭环系统的阶跃响应进行比较。
图(1)步骤(syscl)
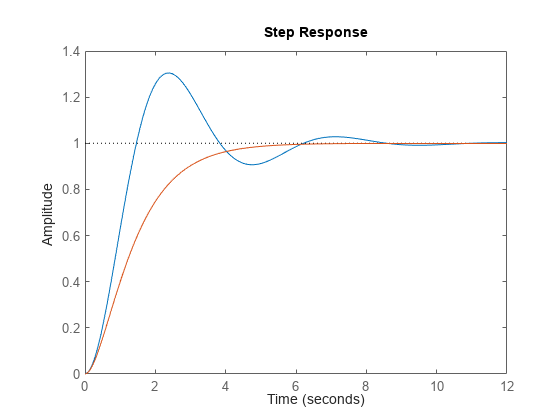
因此,使用获得的闭环系统极点位置是稳定的具有良好的稳态响应。
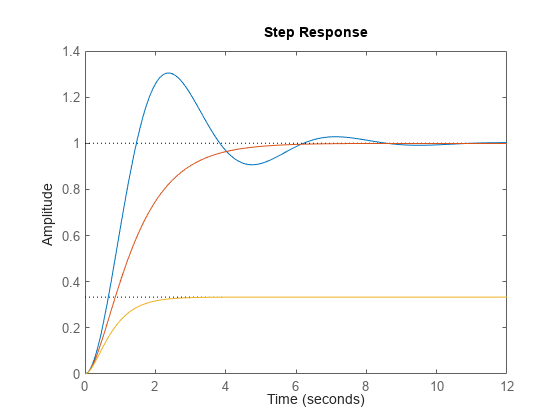
注意,选择远离的波兰人虚轴实现更快的响应时间,但会降低系统的稳态增益。例如,考虑使用两极(2、3)上述系统。
p = [2、3];K2 = (A、B、p)的地方;syscl2 = ss (a - B * K2, B, C, D);图(1);步骤(syscl2);
stepinfo (syscl)
ans =结构体字段:上升时间:2.5901 TransientTime: 4.6002 SettlingTime: 4.6002 SettlingMin: 0.9023 SettlingMax: 0.9992过度:0负脉冲信号:0峰:0.9992 PeakTime: 7.7827
stepinfo (syscl2)
ans =结构体字段:上升时间:1.4130 TransientTime: 2.4766 SettlingTime: 2.4766 SettlingMin: 0.3003 SettlingMax: 0.3331过度:0负脉冲信号:0峰:0.3331 PeakTime: 4.1216
杆位置精度
对于这个示例,考虑到极点的位置(2 e-13, 3的军医,3 e - 3)。计算实际的波兰人的精度。
= [4、2、1,0,1,2,0,1 e-8, 1];B = [1, 2, 3, 1; 1 e-6 0];p = (2 e-13, 3的军医,3 e - 3);[~,prec] = (A、B、p)的地方
prec = 2
得到精确值2表明实际的极点位置精确到小数点后2位。
钢管放置使用复杂的波兰人
对于这个示例,考虑下面的传递函数与复共轭极点 :
输入传递函数模型。然后,将它转换成状态空间形式的地方使用一个和B矩阵作为输入参数。
s =特遣部队(“年代”);systf = 8 / (s ^ 2 + 4 * s + 2);sys = ss (systf);
接下来,计算增益矩阵K使用复共轭极点。
p =[2 + 2我2-2i];K =地方(sys.A sys.B p)
K =1×20 1.5000
增益矩阵的值是真实的两极是自共轭。的值K将复杂的如果p不包含自共轭极点。
现在,验证闭环系统的阶跃响应。
syscl = ss (sys.A-sys.B * K sys.B sys.C, sys.D);步骤(syscl)
杆位置观测器设计
对于这个示例,考虑以下输出:状态空间模型
创建定义的状态空间模型的输出状态空间矩阵如下:
一个= [1,-0.75;1,0];B = (1, 0);C = [1];D = 0;工厂= ss (A, B, C, D);
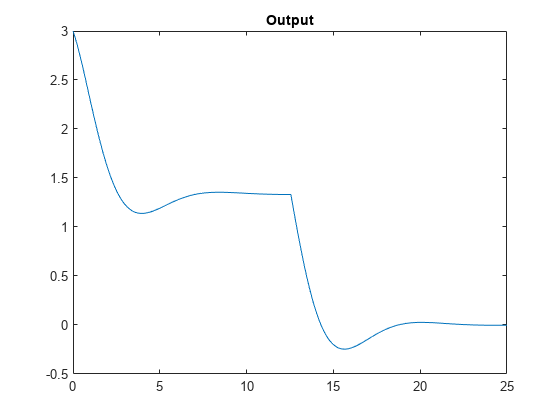
现在,为植物提供一个脉冲和模拟使用lsim。策划的输出。
N = 250;t = linspace (0、25、N);u = [(N / 2,1);0 (N / 2,1)];x0 = [1, 2];(y, t, x) = lsim(植物,u, t, x0);图绘制(t、y);标题(“输出”);
对于这个示例,假设所有状态变量不能被衡量,只有输出测量。因此,设计一个观察者测量。使用的地方计算估计获得通过置换一个矩阵和替换C '对矩阵B。对于本实例,选择所需的磁极位置2和3。
L =(一个“C”, [2、3]) ';
使用估计获得替代状态矩阵使用对偶原理/分离和建立状态空间模型的估计。
在C = l *;Bt = [B, L];Ct = [C;眼(2)];sysObserver = ss (Bt, Ct, 0);
模拟系统的时间响应使用相同的脉冲输入。
[observerOutput t] = lsim (sysObserver (u, y), t);yHat = observerOutput (: 1);xHat = observerOutput (: 3 [2]);
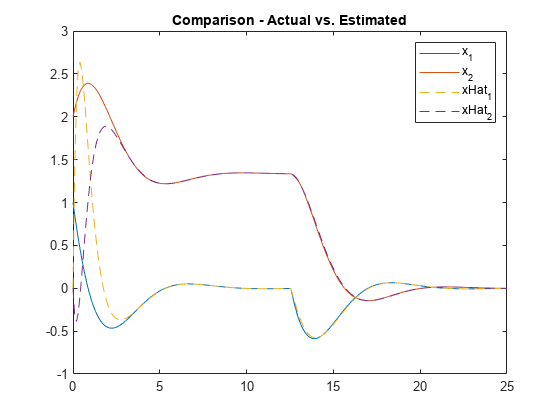
比较实际的反应系统和估计系统。
图;情节(t, x);持有在;情节(t, xHat“——”);传奇(“x_1”,“x_2”,“xHat_1”,“xHat_2”)标题(“比较实际与估计”);
输入参数
输出参数
引用
[1]考茨基,J。,N.K. Nichols, and P. Van Dooren, "Robust Pole Assignment in Linear State Feedback,"国际期刊的控制,41(1985),页1129 - 1155。
[2]到来,抗干扰和m . Wette算法和软件为极点配置和观察员ucrl - 15646启1,EE部门,加州大学的圣芭芭拉分校,1984年9月。
版本历史
之前介绍过的R2006a