TuningGoal.StepTrackingclass
包:TuningGoal
阶跃响应要求控制系统调优
描述
使用TuningGoal.StepTracking指定一个目标从指定的输入指定的输出阶跃响应的控制系统。使用这种调优目标与控制系统调优命令等systune或looptune。
建设
要求的事情= TuningGoal.StepTracking (inputname,outputname,refsys)refsys。约束条件是满足当调谐和目标之间的相对差异反应属于一个指定的公差RelGap属性的优化目标(见属性)。inputname和outputname可以描述的输出或MIMO控制系统的响应。对MIMO反应,输入的数量必须等于输出的数量。
要求的事情= TuningGoal.StepTracking (inputname,outputname,τ)τ:
要求的事情= TuningGoal.StepTracking (inputname,outputname,τ,过度)τ、自然频率1 /τ,比例超过过度:
的阻尼ζ= cos(量化(π,日志(过度/ 100)))。
输入参数
|
输入信号的优化目标,指定为一个特征向量,应用调优目标,单元阵列的特征向量。
关于分析分控制系统模型的更多信息,见马克的信号对控制系统的分析和设计。 |
|
输出信号的优化目标,指定为一个特征向量,输出优化目标,单元阵列的特征向量。
关于分析分控制系统模型的更多信息,见马克的信号对控制系统的分析和设计。 |
|
参考系统阶跃响应为目标,指定为一个动态系统模型,例如
为达到最佳效果, |
|
阶跃响应时间常数或自然的目标,指定为一个积极的标量。 如果你使用语法
如果你使用语法
给出系统的阻尼 |
|
百分比超过目标的阶跃响应,指定为一个标量值的范围(0100)。 |

属性
|
参考系统阶跃响应为目标,指定输出或MIMO状态( 如果你使用 如果你使用
|
|
最大相对匹配错误,指定为一个积极的标量值。这个属性指定匹配的公差之间的最大相对间隙目标和实际的一步反应。的相对差距的定义是:
y(t)- - -y裁判(t)是响应不匹配,1 -y裁判(t)是step-tracking目标模型的误差。 表示信号的能量(2-norm)。 增加的价值 默认值:0.1 |
|
参考信号扩展,指定为一个向量的积极的实际价值。 跟踪了一种要求,当单位的选择结果在小型和大型的混合信号响应的不同渠道,使用这个属性来指定每个条目的相对振幅在向量值步骤的输入。此信息用于规模非对角的条款对跟踪误差的传递函数引用。这个比例可以确保他们测量相对于每个参考信号的振幅。 例如,假设 要求的事情。我nputScaling = [100,1]; 这告诉软件考虑第一参考信号是100倍第二参考信号。 默认值, 默认值: |
|
输入信号名称指定为一个单元阵列特征向量识别输入的传递函数约束优化的目标。的初始值 |
|
输出信号名称指定为一个单元阵列特征向量识别输出的传递函数约束优化的目标。的初始值 |
|
应用模型的优化目标,指定为一个向量的指数。 使用 要求的事情。模型= 2:4; 当 默认值: |
|
反馈回路打开当评估优化目标,指定为一个单元阵列特征向量识别loop-opening位置。调优的目标是评估针对开环配置由开放位置您识别反馈循环。 如果您使用的是调优目标优化控制系统仿真软件模型,金宝app 如果您使用的是调优目标优化广义状态空间( 例如,如果 默认值: |
|
调优目标名称,指定为一个特征向量。 例如,如果 要求的事情。的名字='LoopReq'; 默认值: |
例子
阶跃响应与指定的公差要求
创建一个名为要求的阶跃响应信号“r”一个信号给“y”。制约了阶跃响应传递函数相匹配H= 10 / (年代+ 10),但允许目标调谐响应之间的相对变异的20%。
H =特遣部队(10、10 [1]);要求= TuningGoal.StepResp (“r”,“y”、H);
默认情况下,这个要求允许相对间隙0.1目标和优化之间的反应。改变的相对差距为20%,设置RelGap房地产的需求。
要求的事情。RelGap = 0.2;
检查要求。
viewGoal(要求的);
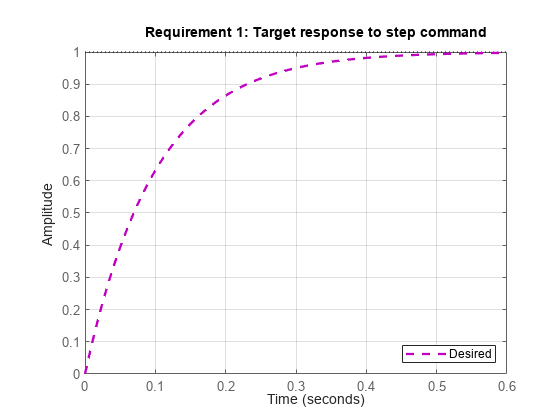
虚线显示指定的目标阶跃响应这个要求。您可以使用这个需求来调整控制系统模型,T,包含有效的输入和输出位置命名“r”和“y”。如果你这样做,命令viewGoal(点播,T)块实现阶跃响应“r”来“y”比较目标响应。
一阶阶跃响应与时间常数
创建一个指定的要求一阶阶跃响应时间常数的5秒。创建要求的阶跃响应信号“r”一个信号给“y”。
要求= TuningGoal.StepResp (“r”,“y”5);
当你使用这个需求来优化控制系统模型,T,时间常数5表达的单位的控制系统。例如,如果T是一个一族模型和财产T.TimeUnit是“秒”,那么这个要求指定一个目标5秒的时间常数输入的响应“r”到输出“y”的“T”。
指定的时间常数转换为引用存储在状态空间模型ReferenceModel房地产的需求。
refsys =特遣部队(Req.ReferenceModel)
refsys = 0.2 - - - - - - - s + 0.2连续时间传递函数。
正如所料,refsys是一个一阶模型。
检查要求。的viewGoal命令显示目标响应,这是参考模型的阶跃响应。
viewGoal(要求的);
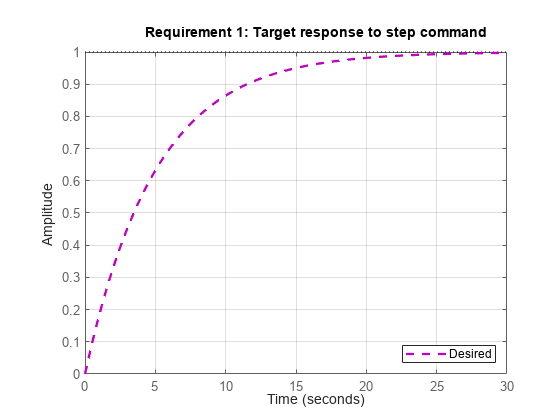
虚线显示指定的目标阶跃响应这个要求,一个一阶响应时间常数的5秒钟。
二阶阶跃响应与已知的自然时间和超调
创建一个指定了一个二阶阶跃响应需求的自然周期5秒,超过10%。创建要求的阶跃响应信号“r”一个信号给“y”。
要求= TuningGoal.StepResp (“r”,“y”、5、10);
当你使用这个需求来优化控制系统模型,T,自然周期5表达的单位的控制系统。例如,如果T是一个一族模型和财产T.TimeUnit是“秒”,那么这个要求指定一个目标5秒的自然周期输入的响应“r”到输出“y”的“T”。
指定的参数响应转换为引用存储在状态空间模型ReferenceModel房地产的需求。
refsys =特遣部队(Req.ReferenceModel)
refsys = 0.04 - - - - - - - - - - - - - - - - - - - - - - - - s ^ 2 + 0.2365 + 0.04连续时间传递函数。
正如所料,refsys是一个二阶模型。
检查要求。的viewGoal命令显示目标响应,这是参考模型的阶跃响应。
viewGoal(要求的);
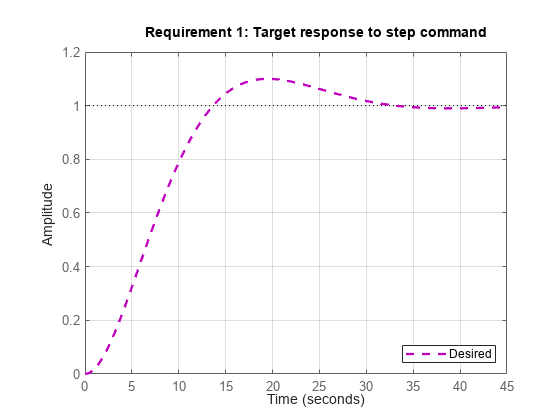
虚线显示指定的目标阶跃响应这个要求,二阶响应超过10%的自然周期5秒钟。
有限的跟踪目标模型应用程序和额外的循环开口
创建一个优化目标,指定一个一阶阶跃响应时间常数的5秒。设置模型和开口属性进一步配置调优目标的适用性。
要求= TuningGoal.StepTracking (“r”,“y”5);要求的事情。模型= [2 3];要求的事情。机会=“远核圈”
当输入的优化控制系统“r”,一个输出“y”,一个分析的位置“远核圈”,你可以使用要求的事情作为一个输入looptune或systune。设置开口属性指定的阶跃响应“r”来“y”测量回路打开的“远核圈”。优化控制系统模型的一个数组时,设置模型属性限制调优的目标是如何应用的。在这个例子中,调优目标只适用于第二个和第三个模型在一个数组中。
提示
这个调优目标强加了一个隐式稳定约束的闭环传递函数
输入来输出评估循环打开,点确定开口。这个隐式约束的动力学影响稳定的动力学调优目标。的MinDecay和MaxRadius选项的systuneOptions对这些隐式约束动力学控制范围。如果优化不能满足默认的边界,或者默认的边界冲突与其他需求,使用systuneOptions更改这些默认值。
算法
当你调整控制系统使用TuningGoal,软件优化的目标转换成规范化的标量值f(x)。在这里,x是免费的(可调)的矢量控制系统参数。软件然后调整参数值最小化f(x)或开车f(x)低于1如果调优的目标是硬约束。
为TuningGoal.StepTracking,f(x)是由:
T(年代,x)的闭环传递函数输入来输出与参数值x,T裁判(年代)中指定的参考模型ReferenceModel财产。
表示H2规范(见规范)。
版本历史
介绍了R2016a另请参阅
looptune|systune|looptune (slTuner)(金宝app仿真软件控制设计)|systune (slTuner)(金宝app仿真软件控制设计)|viewGoal|evalGoal|TuningGoal.Tracking|TuningGoal.Overshoot