nlmpc
描述
一个非线性模型预测控制器计算最优控制在使用非线性预测模型预测地平线,非线性成本函数和非线性约束。有关非线性MPC的更多信息,请参阅非线性MPC。
创建
语法
描述
输入参数
属性
对象的功能
nlmpcmove |
计算最优控制行动非线性MPC控制器 |
validateFcns |
分析预测模型和自定义的函数nlmpc或nlmpcMultistage对象的潜在问题 |
convertToMPC |
转换nlmpc到一个或多个对象货币政策委员会对象 |
createParameterBus |
创建金宝app总线对象和配置总线创造者块传递模型参数非线性MPC控制器 |
例子
创建非线性MPC控制器离散时间预测模型
创建一个非线性MPC控制器有四个州,两个输出,和一个输入。
nx = 4;纽约= 2;ν= 1;nlobj = nlmpc (nx、纽约、ν);
零权重应用于一个或多个ov因为有MVs比ov少。
指定控制器的样品时间和视野。
t = 0.1;nlobj。Ts=Ts;nlobj。PredictionHorizon = 10;nlobj。ControlHorizon = 5;
指定控制器的状态函数,在这个文件中pendulumDT0.m。离散时间模型集成了连续时间模型中定义pendulumCT0.m使用多步向前欧拉方法。
nlobj.Model。StateFcn =“pendulumDT0”;nlobj.Model。IsContinuousTime = false;
离散时间状态函数使用一个可选参数,样品时间Ts,将连续时间模型。因此,您必须指定数量的可选参数1。
nlobj.Model。Nu米berOfParameters = 1;
指定的输出函数控制器。在本例中,第一个和第三个国家定义为输出。尽管这个输出函数不使用可选的样品时间参数,您必须指定参数作为输入参数(Ts)。
nlobj.Model。OutputFcn =@(x,u,Ts) [x(1); x(3)];
验证预测模型的功能为名义上的国家x0和名义上的投入情况。由于预测模型使用一个自定义参数,您必须通过这个参数validateFcns。
x0 =[0.1; 0.2; 0.3 -π/ 2,);情况= 0.4;validateFcns (nlobj x0,情况,[],{Ts});
Model.StateFcn是OK. Model.OutputFcn is OK. Analysis of user-provided model, cost, and constraint functions complete.
创建非线性MPC控制器测量和不可测量的干扰
创建一个非线性MPC控制器三个州,一个输出,和四个输入。前两个输入测量干扰,第三个输入是操纵变量,和第四输入是一个无边无际的干扰。
nlobj = nlmpc (3、1、“MV”3,“医学博士”(1 - 2),“UD”4);
视图控制器状态、输出和输入维度和指标,使用维控制器的属性。
nlobj.Dimensions
ans =结构体字段:NumberOfStates: 3 NumberOfOutputs: 1 NumberOfInputs: 4 MVIndex: 3 MDIndex: [1 - 2] UDIndex: 4
指定控制器样品时间和视野。
nlobj。Ts=0。5; nlobj.PredictionHorizon = 6; nlobj.ControlHorizon = 3;
指定预测模型状态函数,该文件exocstrStateFcnCT.m。
nlobj.Model。StateFcn =“exocstrStateFcnCT”;
指定预测模型的输出功能,在文件中exocstrOutputFcn.m。
nlobj.Model。OutputFcn =“exocstrOutputFcn”;
验证预测模型的功能使用初始操作点作为名义条件测试和设置无限的扰动状态,x0 (3),0。自模型测量干扰,必须通过他们validateFcns。
x0 = (311.2639;8.5698;0);情况= [10;298.15;298.15);validateFcns (x0, nlobj情况(3),情况(1:2)');
Model.StateFcn是OK. Model.OutputFcn is OK. Analysis of user-provided model, cost, and constraint functions complete.
货币政策委员会验证非线性预测模型和自定义函数
创建非线性MPC控制器与六个州,六个输出,和四个输入。
nx = 6;纽约= 6;ν= 4;nlobj = nlmpc (nx、纽约、ν);
零权重应用于一个或多个ov因为有MVs比ov少。
指定控制器样品时间和视野。
t = 0.4;p = 30;c = 4;nlobj。Ts=Ts;nlobj。PredictionHorizon = p;nlobj。ControlHorizon = c;
指定预测模型状态函数和雅可比矩阵的状态函数。对于这个示例,使用模型的飞行机器人。
nlobj.Model。StateFcn =“FlyingRobotStateFcn”;nlobj.Jacobian。StateFcn =“FlyingRobotStateJacobianFcn”;
指定一个自定义代价函数控制器,取代了标准的成本函数。
nlobj.Optimization。CustomCostFcn =@(X,U,e,data) Ts*sum(sum(U(1:p,:))); nlobj.Optimization.ReplaceStandardCost = true;
指定一个自定义的约束函数控制器。
nlobj.Optimization。CustomEqConFcn =@(X,U,data) X(end,:)';
验证预测模型和自定义函数在初始状态(x0)和初始输入(情况)的机器人。
x0 =(-10; -10;π/ 2,0,0,0);情况= 0(ν,1);validateFcns (nlobj x0,情况);
Model.StateFcn是OK. Jacobian.StateFcn is OK. No output function specified. Assuming "y = x" in the prediction model. Optimization.CustomCostFcn is OK. Optimization.CustomEqConFcn is OK. Analysis of user-provided model, cost, and constraint functions complete.
从非线性MPC控制器创建线性MPC控制器
创建一个非线性MPC控制器有四个州,一个输出变量,一个被控变量,一个测量干扰。
nlobj = nlmpc (4 1“MV”,1“医学博士”2);
指定控制器样品时间和视野。
nlobj。PredictionHorizon = 10;nlobj。ControlHorizon = 3;
指定的态函数预测模型。
nlobj.Model。StateFcn =“oxidationStateFcn”;
指定输出变量预测模型的输出功能和规模的因素。
nlobj.Model。OutputFcn =@(x,u) x(3); nlobj.OutputVariables.ScaleFactor = 0.03;
指定被控变量约束和比例因子。
nlobj.ManipulatedVariables。最小值= 0.0704;nlobj.ManipulatedVariables。Max = 0.7042;nlobj.ManipulatedVariables。ScaleFactor = 0.6;
指定测量干扰比例因子。
nlobj.MeasuredDisturbances。ScaleFactor = 0.5;
计算状态和输入操作条件三个线性MPC控制器使用fsolve函数。
选择= optimoptions (“fsolve”,“显示”,“没有”);uLow = (0.38 - 0.5);xLow = fsolve (@ (x) oxidationStateFcn (x, uLow)(0.3 - 0.03 1)选项);uMedium = (0.24 - 0.5);xMedium = fsolve (@ (x) oxidationStateFcn (x, uMedium)(0.3 - 0.03 1)选项);uHigh = (0.15 - 0.5);xHigh = fsolve (@ (x) oxidationStateFcn (x, uHigh)(0.3 - 0.03 1)选项);
创建这些名义上的线性MPC控制器为每个条件。
mpcobjLow = convertToMPC (nlobj xLow uLow);mpcobjMedium = convertToMPC (nlobj xMedium uMedium);mpcobjHigh = convertToMPC (nlobj xHigh uHigh);
您还可以创建多个控制器使用数组的名义条件。的行数的数组指定要创建的数字控制器。线性控制器作为细胞数组返回货币政策委员会对象。
u = [uLow;uMedium;uHigh];x = [xLow;xMedium;xHigh];mpcobjs = convertToMPC (nlobj, x, u);
视图的属性mpcobjLow控制器。
mpcobjLow
MPC对象(03 - mar - 2023上创建05:58:18):- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -采样时间:1(秒)预测地平线:10控制层:3工厂模式:- - - - - - - - - - - - - - - - 1操纵变量(s) - - > | 4州| | | - - > 1测量输出(s)测量扰动(s) - - >输入| 2 | | | - - > 0无边无际的输出(s) 0无边无际的干扰(s) - - > | | 1输出- - - - - - - - - - - - - - - -指数:(输入向量)操纵变量:[1]测量干扰:[2](输出向量)测量输出:[1]干扰和噪声模型:输出扰动模型:默认(类型”getoutdist (mpcobjLow)”)测量噪声模型:默认(缩放后单位增益)重量:ManipulatedVariables: 0 ManipulatedVariablesRate: 0.1000 OutputVariables: 1 ECR: 100000状态估计:默认的卡尔曼滤波器类型(“getEstimator (mpcobjLow)”)约束:0.0704 < = u1 < = 0.7042, u1 /率无约束,日元是无约束使用内置的“激活集”与120年MaxIterations QP解算器。
计划使用非线性MPC最优轨迹
创建一个非线性MPC控制器与六个州,六个输出,和四个输入。
nx = 6;纽约= 6;ν= 4;nlobj = nlmpc (nx、纽约、ν);
零权重应用于一个或多个ov因为有MVs比ov少。
指定控制器样品时间和视野。
t = 0.4;p = 30;c = 4;nlobj。Ts=Ts;nlobj。PredictionHorizon = p;nlobj。ControlHorizon = c;
指定预测模型状态函数和雅可比矩阵的状态函数。对于这个示例,使用模型的飞行机器人。
nlobj.Model。StateFcn =“FlyingRobotStateFcn”;nlobj.Jacobian。StateFcn =“FlyingRobotStateJacobianFcn”;
指定一个自定义代价函数控制器,取代了标准的成本函数。
nlobj.Optimization。CustomCostFcn =@(X,U,e,data) Ts*sum(sum(U(1:p,:))); nlobj.Optimization.ReplaceStandardCost = true;
指定一个自定义的约束函数控制器。
nlobj.Optimization。CustomEqConFcn =@(X,U,data) X(end,:)';
指定线性约束的操纵变量。
为ct = 1:νnlobj.MV (ct)。最小值= 0;nlobj.MV (ct)。Max = 1;结束
验证预测模型和自定义函数在初始状态(x0)和初始输入(情况)的机器人。
x0 =(-10; -10;π/ 2,0,0,0);情况= 0(ν,1);validateFcns (nlobj x0,情况);
Model.StateFcn是OK. Jacobian.StateFcn is OK. No output function specified. Assuming "y = x" in the prediction model. Optimization.CustomCostFcn is OK. Optimization.CustomEqConFcn is OK. Analysis of user-provided model, cost, and constraint functions complete.
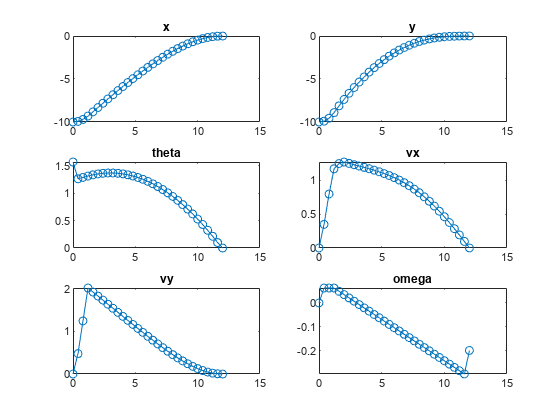
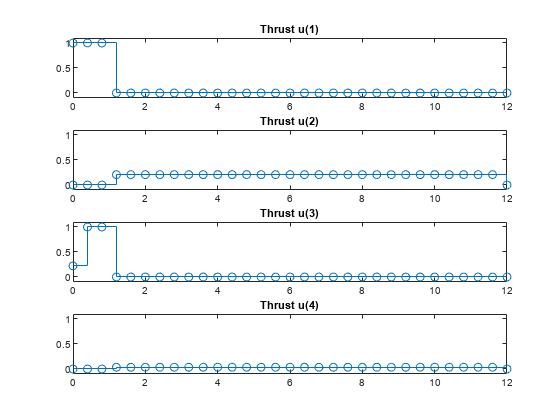
计算最优状态轨迹和操纵变量,返回的信息。
[~,~,信息]= nlmpcmove (x0, nlobj情况);
松弛变量未使用或zero-weighted定制成本函数。所有约束将是非常困难的。
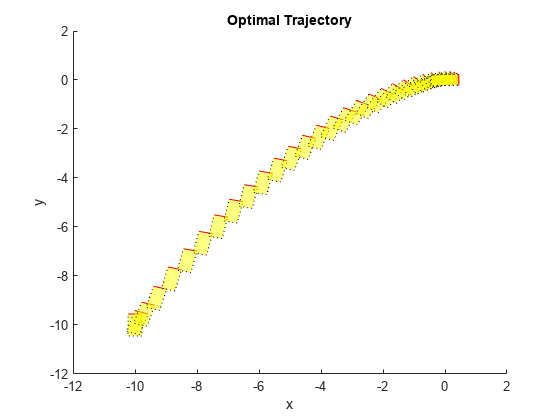
情节最优轨迹。
FlyingRobotPlotPlanning(信息,Ts)
最佳的燃油消耗= 1.884953
使用非线性MPC控制器模拟闭环控制
创建一个非线性MPC控制器有四个州,两个输出,和一个输入。
nlobj = nlmpc (4 2 1);
零权重应用于一个或多个ov因为有MVs比ov少。
指定控制器的样品时间和视野。
t = 0.1;nlobj。Ts=Ts;nlobj。PredictionHorizon = 10;nlobj。ControlHorizon = 5;
指定控制器的状态函数,在这个文件中pendulumDT0.m。离散时间模型集成了连续时间模型中定义pendulumCT0.m使用多步向前欧拉方法。
nlobj.Model。StateFcn =“pendulumDT0”;nlobj.Model。IsContinuousTime = false;
预测模型使用一个可选参数,Ts,代表样品时间。指定参数的数量。
nlobj.Model。Nu米berOfParameters = 1;
指定的输出函数模型,通过样本时间参数作为输入参数。
nlobj.Model。OutputFcn =@(x,u,Ts) [x(1); x(3)];
控制器定义标准的约束。
nlobj.Weights。OutputVariables = 3 [3];nlobj.Weights。米anipulatedVariablesRate = 0.1; nlobj.OV(1).Min = -10; nlobj.OV(1).Max = 10; nlobj.MV.Min = -100; nlobj.MV.Max = 100;
验证预测模型的功能。
x0 =[0.1; 0.2; 0.3 -π/ 2,);情况= 0.4;validateFcns (nlobj x0,情况,[],{Ts});
Model.StateFcn是OK. Model.OutputFcn is OK. Analysis of user-provided model, cost, and constraint functions complete.
只有两个植物状态是可衡量的。因此,创建一个扩展卡尔曼滤波估计的四个工厂。其状态转换函数中定义pendulumStateFcn.m和它的测量中定义的函数pendulumMeasurementFcn.m。
EKF = extendedKalmanFilter (@pendulumStateFcn @pendulumMeasurementFcn);
为模拟定义初始条件,初始化扩展卡尔曼滤波器的状态,并指定一个零初始操纵变量值。
x =[0, 0, -π;0];y = x (x (1); (3)];卡尔曼滤波器。国家= x;mv = 0;
指定输出的参考价值。
yref = [0 0];
创建一个nlmpcmoveopt对象,并指定样本的时间参数。
nloptions = nlmpcmoveopt;nloptions。参数= {Ts};
运行仿真10秒。在每个控制周期:
纠正之前的预测使用当前的测量。
计算最优控制移动使用
nlmpcmove。这个函数返回计算最优序列nloptions。通过更新的选择对象nlmpcmove在接下来的控制区间为最优序列提供了最初的猜测。预测模型。
应用第一个计算最优控制移动到工厂,工厂更新状态。
生成与白噪声传感器数据。
保存植物状态。
时间= 10;xHistory = x;为ct = 1(时间/ Ts):%纠正之前的预测xk =正确(卡尔曼滤波器,y);%计算最优控制动作[mv, nloptions] = nlmpcmove (yref nlobj xk, mv, [], nloptions);%为下一次迭代预测模型预测状态预测(卡尔曼滤波器,[mv;Ts]);%实现第一次最优控制移动x = pendulumDT0 (x, mv, Ts);%生成传感器数据3 y = x ([1]) + randn (2, 1) * 0.01;%保存植物状态xHistory = [xHistory x];结束
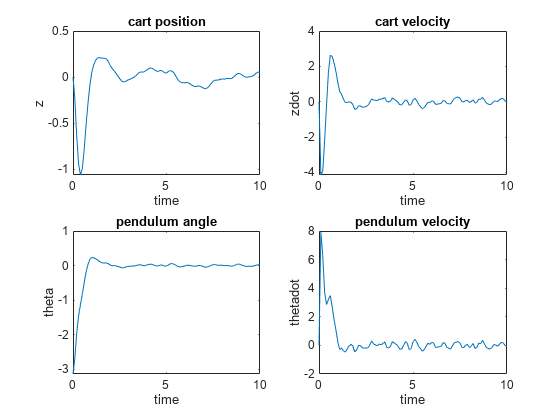
情节产生的状态轨迹。
图次要情节(2 2 1)情节(0:Ts:持续时间、xHistory(1:))包含(“时间”)ylabel (“z”)标题(“车位置”次要情节(2,2,2)情节(0:Ts:持续时间、xHistory(2:))包含(“时间”)ylabel (“zdot”)标题(“车速度”次要情节(2,2,3)图(0:Ts:持续时间、xHistory(3:))包含(“时间”)ylabel (“θ”)标题(“摆角”次要情节(2,2,4)图(0:Ts:持续时间、xHistory(4:))包含(“时间”)ylabel (“thetadot”)标题(“摆速度”)
版本历史
介绍了R2018b