differentialDriveKinematics
描述
differentialDriveKinematics创建一个差动传动车辆模型来模拟简化车辆动力学。这个模型接近车辆用一个固定轴和车轮由指定的宽度。车轮可以独立驱动。车辆速度和航向轴中心的定义。车辆的状态被定义为一个三元素向量,(x yθ),全球xy中指定-安置,米,一辆车,θ中指定,弧度。计算的时间导数状态模型,使用导数函数与输入命令和当前机器人状态。

创建
描述
kinematicModel= differentialDriveKinematics
kinematicModel= differentialDriveKinematics(名称,值)
属性
对象的功能
导数 |
车辆状态的时间导数 |
例子
情节的差动传动运动机器人
创建一个机器人
定义一个机器人和设置起始位置和姿态。
kinematicModel = differentialDriveKinematics;initialState = (0 0 0);
模拟机器人运动
设置仿真的时间间隔1年代0.05时间步长和输入命令50左车轮和rad / s40rad / s的轮导致右转。模拟机器人使用的运动数值解算器的导数函数。
tspan = 0:0.05:1;输入= 50 [40];%左车轮旋转得更快[t、y] =数值(@ (t, y)导数(kinematicModel y输入),tspan, initialState);
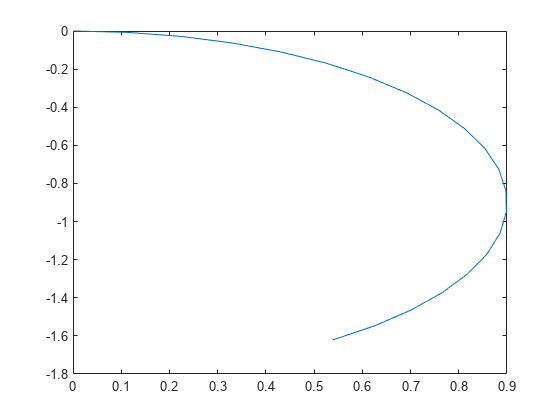
图的路径
图绘制(y y (: 1), (2):,)
引用
[1](merrill Lynch)、凯文·M。,和弗兰克·c·公园。现代机器人:力学、规划和控制第1版。剑桥,麻州:剑桥大学出版社,2017年。
扩展功能
版本历史
介绍了R2019b