importrobot
从URDF、SDF文件、文本或Simscape多体模型
语法
描述
URDF或SDF导入
机器人= importrobot (文件名)rigidBodyTree通过解析指定的URDF (Unified Robot Description Format)或SDF (Simulation Description Format)文件文件名.
机器人= importrobot (___,名称,值)
Simscape多体模型导入
[进口Simscape™多体™建模并返回一个等价的机器人,importInfo) = importrobot (模型)rigidBodyTree对象和关于导入的信息importInfo.在输出中只支持固定关节、移动关节和转动关节金宝apprigidBodyTree对象。
[除了指定选项外,还指定使用一个或多个名称-值对参数的选项Simscape多体根据前面的语法建立模型。使用Simscape多体模型导入名称-值对用于导入使用其他关节类型、约束块或可变惯性的模型。机器人,importInfo) = importrobot (___,名称,值)
例子
从URDF文件中导入机器人
将URDF文件导入为rigidBodyTree对象。
机器人= importrobot (“iiwa14.urdf”)
robot = rigidBodyTree with properties: NumBodies: 10 Bodies: {1x10 cell} Base: [1x1 rigidBody] BodyNames: {1x10 cell} BaseName: 'world' Gravity: [0 0 0] DataFormat: 'struct'
表演(机器人)
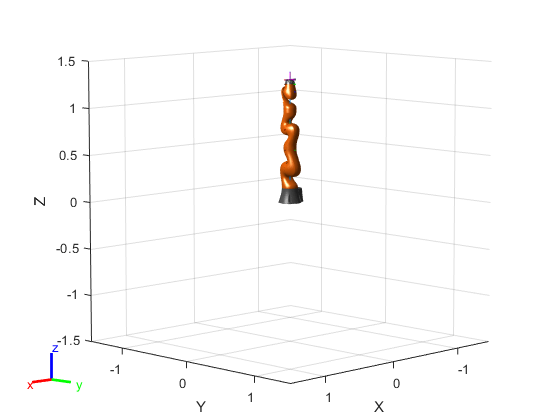
ans=轴(主)和属性:XLim:[-1.5000 1.5000]YLim:[-1.5000 1.5000]XScale:“线性”YScale:“线性”GridLineStyle:“-”位置:[0.1300 0.1100 0.7750 0.8150]单位:“标准化”显示所有属性
从URDF字符向量导入机器人
指定URDF字符向量。该特征向量是创建有效机器人模型的最简描述。
URDFtext =' < ?xml version = " 1.0 " ? > <机器人的名字=“min”> <链接name = " 10 " / > < /机器人>”;
导入机器人模型。描述创建一个rigidBodyTree对象,该对象仅具有名为“10”.
机器人= importrobot (URDFtext)
robot = rigidBodyTree with properties: NumBodies: 0 Bodies: {1x0 cell} Base: [1x1 rigidBody] BodyNames: {1x0 cell} Base: [1x1 rigidBody] BodyNames: {1x0 cell} BaseName: 'L0' Gravity: [0 0 0] DataFormat: 'struct'
用视觉几何图形显示机器人模型
你可以导入具有.stl文件与统一机器人描述格式(URDF)文件相关联,用于描述机器人的视觉几何形状。每个刚体都有一个特定的视觉几何。的importrobot函数解析URDF文件以获得机器人模型和可视几何图形。该函数假定机器人的视觉几何体和碰撞几何体相同,并将视觉几何体指定为相应实体的碰撞几何体。
使用显示函数以图形的形式显示机器人模型的视觉和碰撞几何图形。然后,您可以通过单击组件来检查它们,并右键单击以切换可见性来与模型进行交互。
将机器人模型作为URDF文件导入。这个.stl文件位置必须在这个URDF中正确指定。添加其他.stl文件到单个刚体,看addVisual.
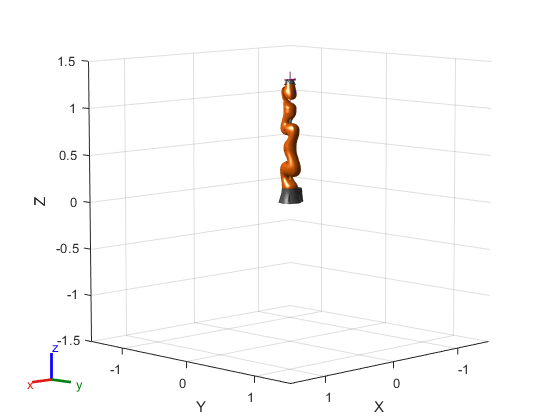
机器人= importrobot (“iiwa14.urdf”);
用相关的视觉模型可视化机器人。点击身体或框架来检查它们。右击物体以切换每个可视几何体的可见性。
表演(机器人,“视觉效果”,“上”,“碰撞”,“关闭”);
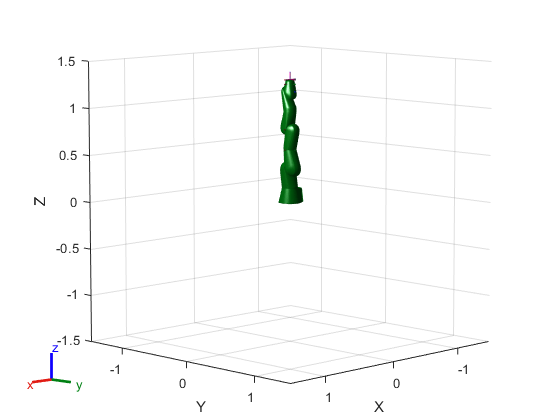
可视化机器人与相关的碰撞几何图形。点击身体或框架来检查它们。右键单击物体以切换每个碰撞几何图形的可见性。
表演(机器人,“视觉效果”,“关闭”,“碰撞”,“上”);
将Simscape™Multibody™模型导入RigidBodyTree对象
导入现有Simscape™ 多体™ 将机器人模型放入机器人系统工具箱™ 作为一个rigidBodyTree对象。
打开Simscape™Multibody™模型。这是仿人机器人的模型。
open_system (“example_smhumanoidrobot.slx”)
导入模型。
[机器人,importInfo] = importrobot (gcs)
robot=rigidBodyTree,属性为:NumBodies:21个实体:{1x21 cell}Base:[1x1 rigidBody]实体名称:{1x21 cell}BaseName:'Base'重力:[0-9.8066]数据格式:'struct'
importInfo = rigidBodyTreeImportInfo with properties: SourceModelName: 'example_smhumanoidrobot' RigidBodyTree: [1x1 RigidBodyTree] blockconverversioninfo: [1x1 struct]
显示创建的详细信息rigidBodyTree对象。
showdetails(导入信息)
-------------------- 机器人:(21)尸体Idx身体名字仿真软件源块联合仿真软件源金宝app块联合类型父母名字(Idx)孩子的名字(s ) --- --------- ---------------------- ---------- ---------------------- ---------- ---------------- ---------------- 1 Body01信息| | |突出Joint01信息列表|突出转动基地(0)Body02 Body02信息(2)2| | |突出Joint02信息列表|突出转动Body01 (1) Body03 (3) 3 Body03信息| | |突出Joint03信息列表|突出转动Body02 (2) Body04 (4) 4 Body04信息| | |突出Joint04信息列表|突出转动Body03 (3) 5 Body05信息| | |突出Joint05信息列表|突出转动基地(0)Body06 (6)6 Body06信息| | |突出Joint06信息列表|突出转动Body05 (5) Body07 (7) 7 Body07信息| | |突出Joint07信息列表|突出转动Body06 (6) Body08 (8) 8 Body08信息| | |突出Joint08信息列表|突出转动Body07 (7) 9 Body09信息| | |突出Joint09信息列表|突出转动基地(0)Body10 (10) 10 Body10信息| | |突出Joint10信息列表|突出转动Body09 (9) Body11 (11) 11 Body11信息| | |突出Joint11信息列表|突出转动Body10 (10) Body12 (12) 12 Body12信息| | |突出Joint12信息列表|突出转动Body11 (11) 13 Body13信息| | |突出Joint13信息列表基础(0)|突出转动列表Body14 (14) 14 Body14信息| | |突出Joint14信息列表|突出转动Body13 (13) Body15 (15) 15 Body15信息| | |突出Joint15信息列表|突出转动Body14 (14) Body16 (16) 16 Body16信息| | |突出Joint16信息列表|突出转动Body15 (15) 17 Body17信息| |列表突出Joint17信息列表| |突出转动基地(0)Body18 (18) 18 Body18信息| | |突出Joint18信息列表|突出转动Body17 (17) Body19 (19) 19 Body19信息| | |突出Joint19信息列表|强调固定Body18 (18) Body20 20 Body20信息(20)| | |突出Joint20信息列表|强调固定Body19 (19) 21Body21 Info | List | Highlight Joint21 Info | List | Highlight fixed Base(0) --------------------
输入参数
输出参数
提示
当导入具有视觉网格的机器人模型时,importrobot函数搜索.stl或.dae文件分配给每个刚体使用以下规则:
该函数从URDF或SDF文件中搜索指定刚体的原始网格路径。对ROS包的引用
软件包:\\远离的。绝对路径直接检查,无需修改。
相对路径的检查顺序如下:
用户指定的
MeshPath当前文件夹
MATLAB®路径
包含URDF或SDF文件的文件夹
在包含URDF或SDF文件的文件夹之上一级
URDF或SDF文件中网格路径中的文件名被附加到
MeshPath输入参数。
如果仍然没有找到网格文件,解析器将忽略网格文件并返回rigidBodyTree没有视觉对象。
你也可以从以下列表中选择一个网站: