使用单摄像头校准应用程序
相机校准器概述
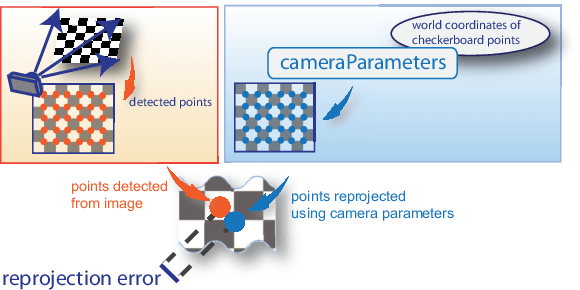
你可以使用相机校准器应用程序估计相机的内在,外在,和镜头失真参数。您可以使用这些相机参数为各种计算机视觉应用程序。这些应用,如从图像中去除镜头失真的影响,测量平面物体,或从多个相机重建三维场景。
所使用的校准功能套件相机校准器App提供摄像机校准的工作流程。您可以在MATLAB中直接使用这些函数®工作区。有关函数列表,请参见摄像机标定.

遵循这个工作流程,使用应用程序校准你的相机。
准备图像,相机和校准模式。
添加图像并选择标准或鱼眼相机模型。
校准相机。
评估校准精度。
调整参数以提高精度(如有必要)。
导出参数对象。
如果默认值工作正常,那么在导出参数之前不需要做任何调整。
选择校准模式
捕捉校准图片
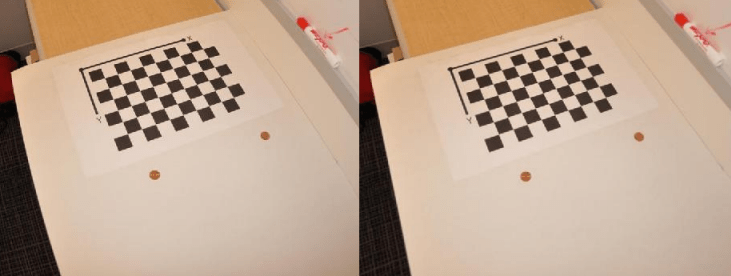
有关最佳校准结果,请在校准模式的10到20个图像之间使用。校准器至少需要三个图像。使用未压缩的图像或无损压缩格式,如PNG。校准模式和相机设置必须满足一组与校准器一起使用的要求。有关摄像机设置和捕获图像的更多详细信息,请参阅准备相机和捕捉图像.
使用相机校准器应用程序
打开应用程序
MATLAB TOOLSTRIP:在应用程序选项卡,图像处理与计算机视觉部分,单击相机校准器图标。
MATLAB命令提示符:输入
cameraCalibrator
添加图像并选择相机模型
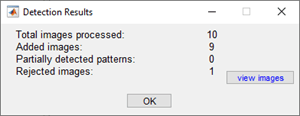
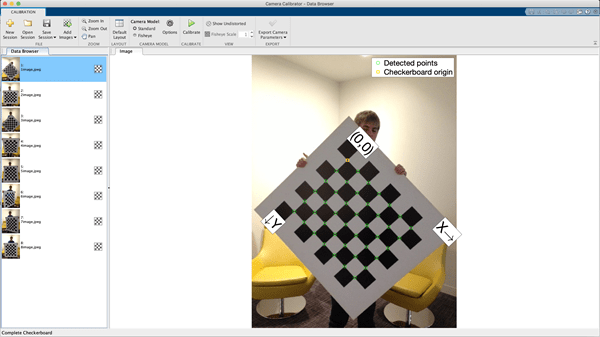
要开始校准,必须添加图像。您可以从文件夹中添加已保存的图像,也可以直接从相机中添加图像。校准器分析图像以确保它们满足校准器的要求。然后校准器检测选定图案的点。摄像机的设置和拍摄请参见准备相机和捕捉图像.
添加图像后,将出现“图像和模式属性”对话框。在校准器能够分析校准模式之前,必须选择校准模式来检测和设置模式结构的图像属性。有关此对话框的详细信息,请参见选择校准模式并设置属性.
校准
一旦你对接受的图像感到满意,就开始校准选项卡,选择校准.默认校准设置使用最小一组相机参数。首先使用默认设置运行校准。在评估结果后,您可以通过调整设置或添加或移除图像来尝试提高校准精度,然后再次校准。如果在标准和Fisheye相机型号之间切换,则必须重新校准。
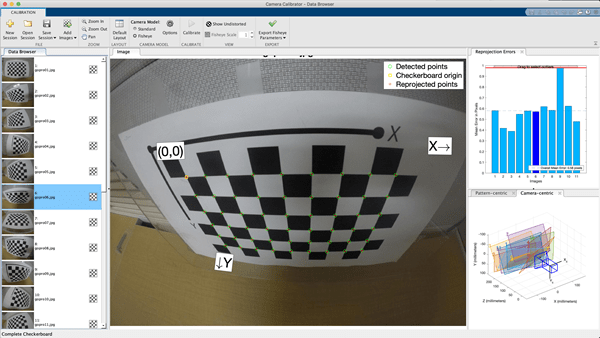
评估校准结果
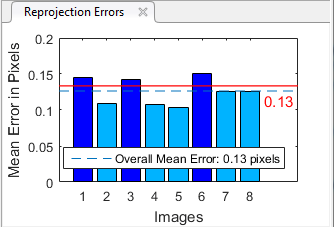
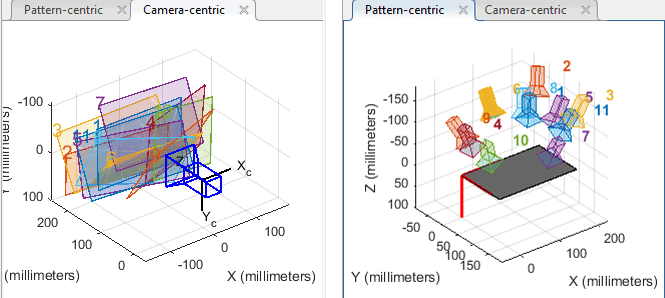
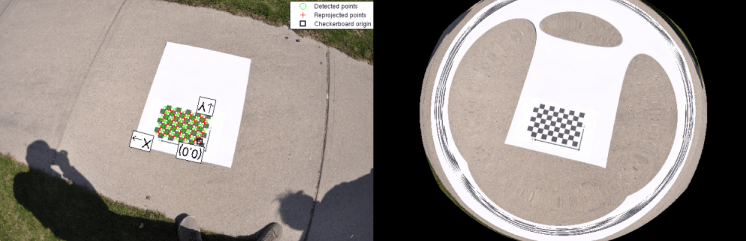
您可以通过检查检测错误,检查相机外在或观看未置换图像来评估校准精度。有关最佳校准结果,请使用所有三种评估方法。

提高校准
为了改进校准,您可以删除高误差的图像,添加更多的图像,或修改校准器设置。
考虑添加更多图像如果:
你只有不到10张图片。
校准模式没有覆盖足够的图像帧。
校准模式在相对于相机的方向上没有足够的变化。
考虑删除图像,如果图像:
具有高均值的重注错误。
都是模糊的。
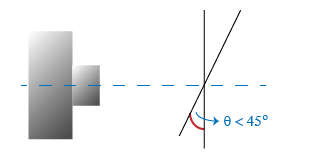
包含一个相对于相机平面大于45度的校准图案。
检测错误的校准模式点。


导出相机参数
当您对校准精度感到满意时,选择导出相机参数对于一个标准的相机型号或导出相机参数为鱼眼相机模型。您可以将摄像机参数导出到MATLAB工作区中的对象,也可以使用MATLAB脚本生成摄像机参数。
参考文献
[1] Zhang, Z. " A Flexible New Technique for Camera Calibration. "图案分析和机器智能的IEEE交易.22日,没有。11(2000年11月):1330-34。https://doi.org/10.1109/34.888718。
[2] Heikkila,J.和O. Silven。“具有隐式图像校正的四步相机校准程序。”在IEEE计算机学会计算机视觉与模式识别会议论文集.1106 - 12所示。波多黎各圣胡安:IEEE计算。Soc, 1997年。https://doi.org/10.1109/CVPR.1997.609468。
Scaramuzza, Davide, Agostino Martinelli和Roland Siegwart。"方便校准全方位摄像机的工具箱"在IEEE智能机器人与系统国际研讨会论文集2006, 5695 - 701。北京:电子科技大学,2006。https://doi.org/10.1109/IROS.2006.282372
[4]城市,Steffen,Jens Leitloff和Stefan Hinz。“改善广角,鱼眼和全向相机校准。”摄影测量与遥感学报108(2015年10月):72-79。https://doi.org/10.1016/j.isprsjprs.2015.06.005。
另请参阅
应用程序
功能
showReprojectionErrors|showExtrinsics|undistortImage|侦探校验erboardpoints.|generateCheckerboardPoints|estimateCameraParameters
对象
相关的例子
- 校准模式
- 准备相机和捕捉图像
- 选择校准模式并设置属性
- 单摄像机标定精度评估
- 用校准相机测量平面物体
- 相机校准使用AprilTag标记
- 运动中的结构,两种观点
- 来自多种视图的运动的结构
- 立体声视频深度估计
- 3-D点云注册和拼接
- 未校准的立体图像校正
- 棋盘模式
- 对称圆网格图
- 非对称圆网格图
更多关于
你也可以从以下列表中选择一个网站:
