使用立体相机校准应用程序
立体相机校准概述
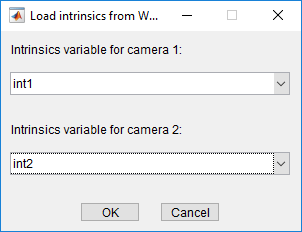
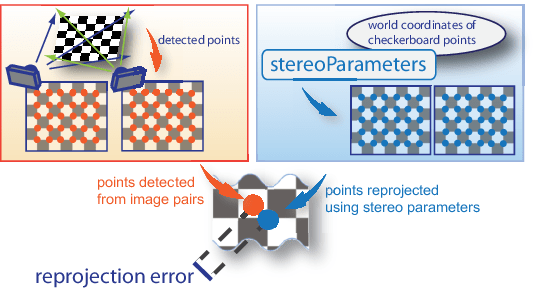
你可以使用立体相机校准器应用程序来校准立体声相机,然后可以使用它来恢复图像的深度。立体声系统由两个相机:相机1和相机2.应用程序可以估计或导入各个摄像机的参数。该应用还可以根据相机1计算相机2的位置和方向。
这立体相机校准器应用程序生成包含立体摄像机参数的对象。您可以将此对象使用此对象:
校正立体声图像使用
rectifyStereoImages功能。重建一个三维场景使用
reconstructScene功能。方法计算匹配图像点对对应的三维位置
由三角形组成的功能。
所使用的校准功能套件立体相机校准器App提供了立体系统校准的工作流程。您可以在MATLAB中直接使用这些函数®工作区。有关校准功能的列表,请参见摄像机标定.
笔记
你可以使用相机校准器带有95度视野(FOV)的摄像头的应用程序。

遵循以下工作流程,使用应用程序校准您的立体相机:
准备图像,相机和校准模式。
添加图像对。
校准立体相机。
评估校准精度。
调整参数以提高精度(如有必要)。
导出参数对象。
在某些情况下,默认值可以很好地工作,在导出参数之前不需要做任何改进。您还可以在MATLAB工作空间中直接使用摄像机校准函数进行改进。有关函数列表,请参见摄像机标定.
选择校准模式
捕捉校准图片
为了获得最佳的校准结果,请使用10到20张校准模式的图像。校准器至少需要三张图像。使用未压缩的图像或无损压缩格式,如PNG。校准模式和相机设置必须满足校准器工作的一系列要求。有关相机设置和捕捉图像的更多细节,请参见准备相机和捕捉图像.
使用立体相机校准应用程序
打开应用程序
MATLAB TOOLSTRIP:在应用程序选项卡,图像处理和计算机视觉部分,单击立体相机校准器图标。
MATLAB命令提示符:输入
stereoCameraCalibrator
添加图像对并选择相机模型
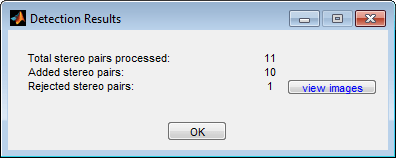
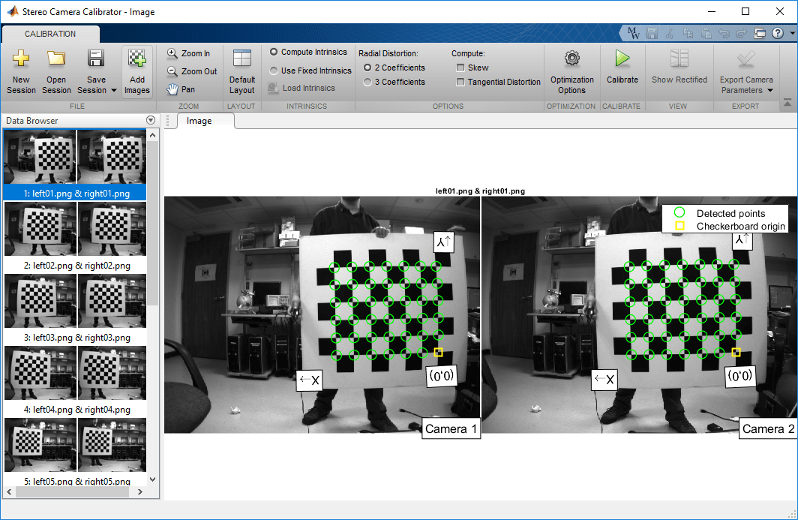
要开始校准,必须添加图像。您可以从文件夹中添加保存的图像或直接从相机添加图像。校准器分析图像以确保它们满足校准器要求。然后校准器检测图案上的点。有关摄像机设置和捕获图像的详细信息,请参阅准备相机和捕捉图像
加载图像后,图像和模式属性将出现对话框。在校准器可以分析校准模式之前,必须选择校准模式以检测和设置图案结构的图像属性。有关此对话框的详细信息,请参阅选择校准模式和设置属性.
校准
一旦您对接受的图像对感到满意,单击校准纽约州校准选项卡。默认校准设置假设摄像机参数的最小集。首先使用默认设置运行校准。在评估结果之后,您可以尝试通过调整设置和添加或删除图像来提高校准精度,然后再次校准。
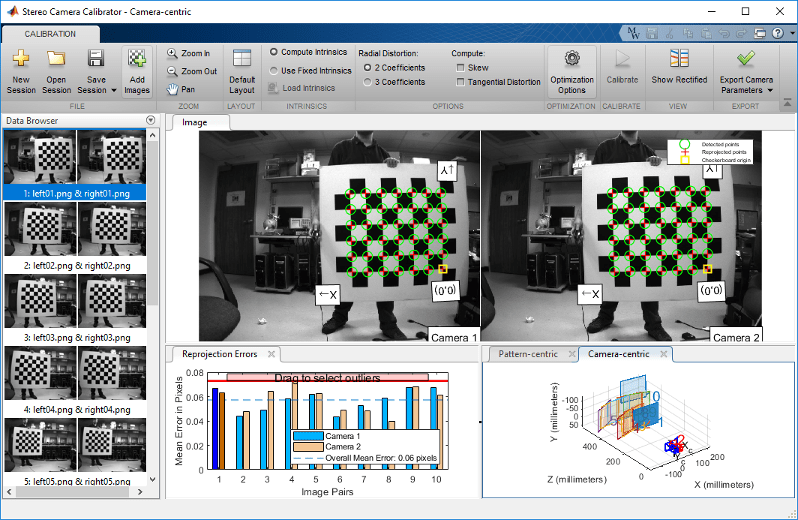
评估校准结果
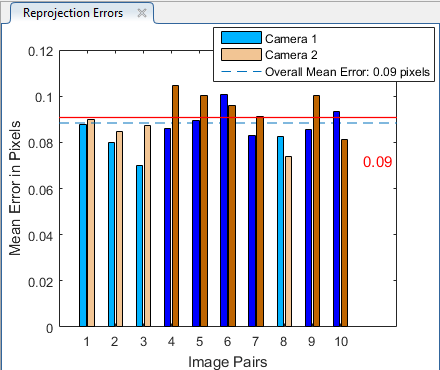
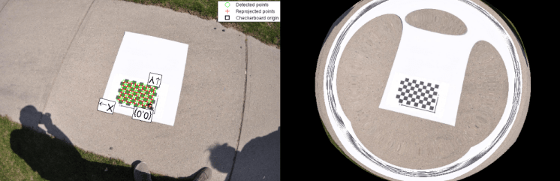
您可以通过检查重投影误差、检查相机外部或查看未失真的图像来评估校准精度。为了获得最佳的校准结果,请使用所有三种评估方法。


提高校准
为了改进校准,您可以删除高误差的图像,添加更多的图像,或修改校准器设置。
考虑添加更多的图像对,如果:
你只有不到10对图像。
校准模式不足以覆盖足够的图像框架。
校准模式在相对于相机的方向上没有足够的变化。
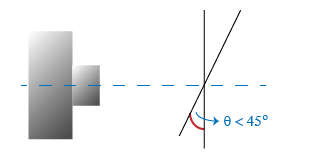
考虑去除图像对,如果图像:
有较高的平均重投影误差。
都是模糊的。
包含一个相对于相机平面大于45度的校准图案。
检测错误的校准模式点。


出口相机参数
当您对校准精度感到满意时,选择出口相机参数.您可以将摄像机参数保存并导出到MATLAB工作区中的对象中,也可以使用MATLAB脚本生成摄像机参数。
参考文献
[1] Zhang, Z.“一种灵活的摄像机标定新技术”。图案分析和机器智能的IEEE交易.22日,没有。11(2000年11月):1330-34。https://doi.org/10.1109/34.888718。
J·海克拉和o·西尔文。带有隐式图像校正的四步摄像机校准程序。在IEEE计算机学会计算机视觉与模式识别会议论文集, 1106 - 12所示。波多黎各圣胡安:IEEE计算。Soc, 1997年。https://doi.org/10.1109/CVPR.1997.609468。
也可以看看
应用程序
职能
Showreproizhererrors.|showExtrinsics|undostortimage.|侦探校验erboardpoints.|generateCheckerboardPoints|estimateCameraParameters
对象
相关例子
- 评估单相机校准的准确性
- 用校准的相机测量平面物体
- 相机校准使用AprilTag标记
- 运动中的结构,两种观点
- 结构从多视图运动
- 立体声视频深度估计
- 3-D点云配准与拼接
- 未校准的立体图像校正
- 棋盘模式
- 对称圆圈网格图案
- 非对称圆网格图
更多关于
你也可以从以下列表中选择一个网站:
