自动化驾驶工具箱
Entwicklung,模拟und test von Adas und autonomen fahrsystemen
Die Automated Driving Toolbox™UMFASST算法und Tools Zum Entwerfen,Simulieren und Testen von Fahrerassistendstremen(Adas)und Automatisierten Fahrsystemen。SieKönnenVisuelle und Lidar-Wahrnehmungssysteme Sowie SensorFusion,Bahnplanung und Fahrzeugregelungssysteme Entwerfen und Testen。Zu denisierungswerkzeugengehörendie Ansicht Aus der Vogelperspektive Mit Darstellung der Sensorabdeckung,Detektionen und Tracks,Sowie Die Visualisierung Von视频,Lidar-Daten und Karten。MIT der ToolboxKönnenSieHy HD Live Map-Daten und Opendrive®-straßennetzeimportierenundfürihrearbeit nutzen。
Nutzen Sie Die Prict-Trug-Label App UM DAS Erterlen der地面真理Zum Trainieren und Auswerten von Wahrnehmungsalgorithen Zu Automatisieren。Fürulity-in-in-loop-tests(HIL)und Desktop-Simulatingen von Wahrnehmung,SensorFusion,Bahnplanung und SteuerlogikKönnenSIEFahrszenarienGenerieren Und Simulieren。Simulieren Sie Kamera-,Radar-und Lidar-Sensorausgaben在Einer Fotorealistischen 3D-Umgebung und Sensordetektionen von Objekten und Fahrspurgrenzen在Einer 2,5-D-Simulationsumgebung。
Die Automation Driving Toolbox StelltRegerenwendungsbeispieleFürWeitverbreiteteFunktioNen Rund Um Adas Und Autuatisiertes Fahren Wie FCW(KollisionSastentent),ACB(NotBremsistent),ACC(AbstandsRegeltempomat),LKA(Spurhalteassistent)und Fahrerloses Parken(自动代客停车)Zurverlose ParkenDie ToolboxUnterstütztieGoierungvon C / C ++ - 代码FÜREINESCHELLE原型THILOPENENTWicklung und HIL-TESTS MIT算法FÜR传感器FERSFUSION,跟踪,BAHNPLANUNG und Fahrzeugregelungssysteme。
Jetzt Beginnen:


Kostenlose白皮书
SensorFusion und跟踪Für自动体组系统

Erkennen Von Fahrzeugen und Spuren在Der Regetenwend Zum Visuellen Wahrnehmungssystem。
fahrsimulation(长方体世界)
Generieren SintheteSche Detektionen Aus Radar- und Kamerasensormodelle,Und Intentieren Sie Diese Detektionen在Fahrszenarien,UM almorithmenFürdas自动机伊斯蒂斯·西伦·艾因模拟器Zu Testen。DefierenSieStraßennetze,Teilnehmer und Sensoren Mit Der Der Der驾驶场景设计师应用程序。Importieren Sie Vordefintierte Euro NCAP-Tests Und Opendrive-Straßennetze。

Fahrszenariusimulation Mit der虚幻引擎
Entwickeln,Testen und Visualisieren Sie Diistung von Fahralgorithmen在Einer Simulierten 3D-Umgebung,De Mit Der Unreal Engine®von史诗游戏®。Dargestellt Wird。

Verwendung Einer 3D-Simulationsbungzzum Aufzeichnen Synthetischer Sensordaten,Entwickeln Einess Spurmarkierungs-Erkennungssystems und Testen Dieses Systems在凡尔森登斯里安。
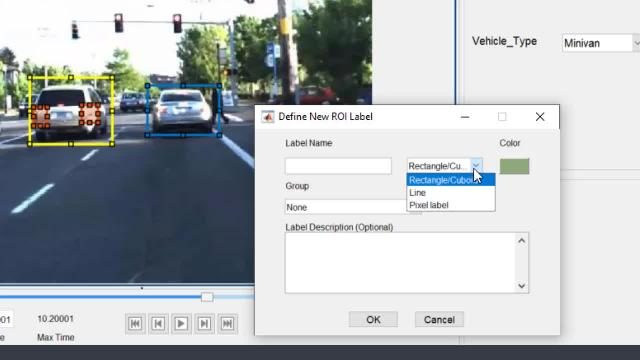
Automatisierung der“地面真理”-Klassifikation
Verwenden Sie Die Grount Truginal Labeler-AppFürInteraktiveund automatisierte地面 - 真理-klassifikation zurUnterstützungvon objekterkennung,Semantischer Segmentierung und Szenenklassifikation。
testen von wahrnehmungsalgorithmen
Bewerten Sie Die Leistung von Wahrnehmungsalgorithmen,Indem Sie Die Grount-TrutgeDen Mit Den Berechneten Werten Verglechen。

Bewerten der ausgabe der Fahrspureerkennung Mithilfe von地面真实性的。
设计Visueller Wahrnehmungssysteme
Entwickeln Sie Computer-Vision-AlgorithmenFüriefahrzeug-,Fußgänger-und Fahrspureerkennung Sowie -Klassifizierung。

Ausgabe Einer仿真MIT Monokularem KameraSensor。
LIDAR-VERARBEITUNG
Nutzen Sie Lidar-Daten Zum Erkennen von Hindernissen und Segmentieren vonGrundflächen。


Visualisierung von Sensorfusionsergebnissen。
Zugriff Auf在这里HD Live Map Daten
Einlesen der Kartendatenüberden here HD Live地图WebService,EinschließlichGekacherteKartenebenen,DieDetaillierteStraßen-,Fahrbahn-und Lokalisierungsinformationen焓焓。

Verwenden von here HD Live Map Zum Verifizieren von Spurkonfigurationen。
Anzeigen der Kartendaten.
Aktualisieren Sie Die Fahrzeugposition Auf der Karte,Währenddasfahrzeugfährt。

Zeigen Sie Streams von Kartendaten An。

Bahnplanung und -Visualisierung在Einer 3D-Umgebung

斯坦利 - Querregler Zum Berechnen von Lenkwinkeln。