主要内容
控制
模拟各种控制器,如一维、二维、三维类型
研究实现架构对设计的影响。形式包括用于一维、二维和三维增益调度的预定义状态空间控制器块;线性插值;观察者和自我调节形式;以及一维、二维和三维矩阵插值。
阻碍
| 1D控制器[A(v)、B(v)、C(v)、D(v)] | 基于一个调度参数实现增益调度状态空间控制器 |
| 1D控制器混合u=(1-L).K1.y+L.K2.y | 通过输出的线性插值实现状态空间控制器的一维矢量 |
| 1D观察员形式[A(v)、B(v)、C(v)、F(v)、H(v)] | 根据一个调度参数实现观测器形式的增益调度状态空间控制器 |
| 1D自调节[A(v)、B(v)、C(v)、D(v)] | 根据一个调度参数实现自适应增益调度状态空间控制器 |
| 2D控制器[A(v)、B(v)、C(v)、D(v)] | 基于两个调度参数实现增益调度状态空间控制器 |
| 2D控制器混合 | 通过输出的线性插值实现状态空间控制器的二维矢量 |
| 二维观察者形式[A(v),B(v),C(v),F(v),H(v)] | 利用两个调度参数实现观测器形式的增益调度状态空间控制器 |
| 2D自调节[A(v),B(v),C(v),D(v)] | 基于两个调度参数实现自适应增益调度状态空间控制器 |
| 3D控制器[A(v)、B(v)、C(v)、D(v)] | 基于三个调度参数实现增益调度状态空间控制器 |
| 三维观察者形式[A(v),B(v),C(v),F(v),H(v)] | 基于三个调度参数实现观测器形式的增益调度状态空间控制器 |
| 三维自调节[A(v),B(v),C(v),D(v)] | 基于两个调度参数实现自适应增益调度状态空间控制器 |
| 获得预定超前滞后 | 利用增益调度系数实现一阶超前滞后 |
| 插值矩阵(x) | 给定输入的返回插值矩阵 |
| 插值矩阵(x,y) | 给定输入的返回插值矩阵 |
| 插值矩阵(x,y,z) | 给定输入的返回插值矩阵 |
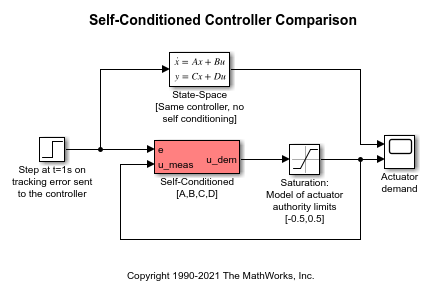
| 自我调节的 | 状态空间控制器的自适应实现 |
特色示例

也可以从以下列表中选择网站: