主要内容
扩展卡尔曼筛选器
离散时间非线性系统状态估计的扩展卡尔曼滤波器
- 库:
控制系统工具箱/状态估计
系统识别工具箱/评估器
描述
的扩展卡尔曼筛选器块估计离散时间非线性系统的状态,采用一阶离散时间扩展卡尔曼滤波算法。
考虑一个州的植物x、输入u、输出y,过程噪声w,测量噪声v.假设你可以将植物表示为一个非线性系统。
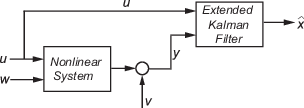
使用系统的状态转换和测量功能和扩展的卡尔曼滤波算法,块产生状态估计 当前时间步长。有关算法的信息,请参见扩展和Unstented Kalman滤波器算法用于在线状态估计.
您可以为系统创建非线性状态转换功能和测量功能,并在块中指定这些函数。该块支持具有以不同采金宝app样率运行的多个传感器的系统的状态估计。您可以指定多达五种测量功能,每一种对应于系统中的一个传感器。您还可以指定状态转换和测量功能的jacobians。如果未指定它们,则软件数值计算雅可比人。有关更多信息,请参阅状态转换和测量功能.
港口
输入
输出
参数
更多关于
兼容性考虑因素
扩展功能
另请参阅
块
功能
介绍了R2017a
您还可以从以下列表中选择一个网站:
