级联多环反馈设计
此示例显示如何使用Simulink®ControlDesign™中的两个级联反馈回路金宝app控制系统设计师。
该示例在机身模型中设计两个级联反馈循环的控制器,使得加速度组件(AZ.)跟踪最大上升时间为0.5秒的参考信号。在此示例中的反馈循环结构使用体速(问:)作为内部反馈回路和加速度(AZ.)作为外部反馈回路。
打开机身模型。
Open_System('scdairframeCtrl')

两个反馈控制器是:
SCDAIRFRAMECTRL / Q控制- 离散时间积分器和增益块稳定内圈。
Open_System('scdairframeCtrl / q控制')

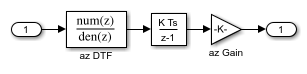
SCDAIRFRAMECTRL / AZ控制- 离散时间积分器,离散传递函数和增益块稳定外环。
Open_System('scdairframeCtrl / az control')
多环系统中的解耦循环
级联反馈系统的典型设计过程是首先设计内环,然后是外环。在控制系统设计师,可以同时设计两个环;默认情况下,在设计多环反馈系统时,循环之间的耦合效果被考虑在内。但是,在同时设计两个反馈循环时,可能需要将反馈环路解耦;也就是说,在调谐内环时,去除外环的效果。在此示例中,您设计内部反馈循环(问:)外环的效果(AZ.删除了。
配置控制系统设计器
使用控制器设计控制系统设计师, 你必须:
选择要调整的控制器块。
创建要查看的开环和闭环响应。
对于此示例,您可以:
发射预配置控制系统设计师通过双击模型左下角的子系统。
配置控制系统设计师使用以下过程。
打开控制系统设计师,在Simulin金宝appk模型中,在应用画廊,点击控制系统设计师。
在“编辑体系结构”对话框中,在块选项卡,单击添加块。在“选择块”对话框的“选择块”对话框中,选择以下块,然后单击好的。
SCDAIRFRAMECTRL / Q控制/ Q增益SCDAirFrameCtrl / AZ控制/ AZ增益SCDAIRFRAMECTRL / AZ控制/ AZ DTF
在这一点信号选项卡,自动添加Simulink模型中定义的分析点作为金宝app地点。
输入:
SCDAIRFRAMECTRL / Step AZ- 输出端口1输出:
SCDAIRFRAMECTRL /机身型号- 输出端口1

要使用所选块和信号,请单击好的。
在里面数据浏览器, 这回应部分包含以下开环响应,控制系统设计师自动识别为开环设计的潜在反馈回路。
输出端口1
SCDAIRFRAMECTRL / AZ控制/ AZ DTF输出端口1
SCDAirFrameCtrl / AZ控制/ AZ增益输出端口1
SCDAIRFRAMECTRL / Q控制/ Q增益
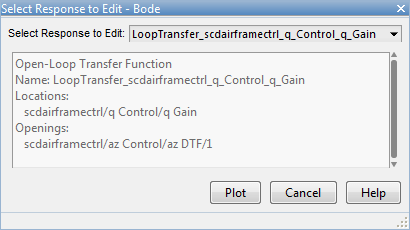
为以下每个响应打开图形Bode编辑器。在控制系统设计师, 选择调整方法> BODE编辑器。然后,在里面选择要编辑的响应下拉列表,选择相应的开环响应,然后单击阴谋。
Outport 1的开环
SCDAIRFRAMECTRL / AZ控制/ AZ DTF

Outport 1的开环
SCDAIRFRAMECTRL / Q控制/ Q增益
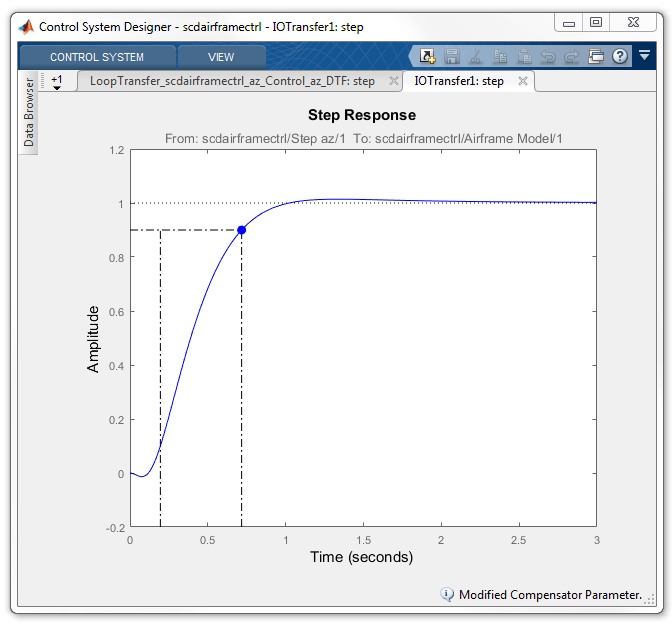
要查看反馈系统的闭环响应,请为新的输入输出传输函数响应创建一个步骤图。选择新的情节>新一步。然后,在“绘制”对话框的新步骤中,在“选择响应绘图下拉列表,选择新的输入输出传输响应。
添加SCDAIRFRAMECTRL / Step AZ / 1作为输入信号和SCDAIRFRAMECTRL /机身型号/ 1作为输出信号。

点击阴谋。
去除外反馈回路的效果
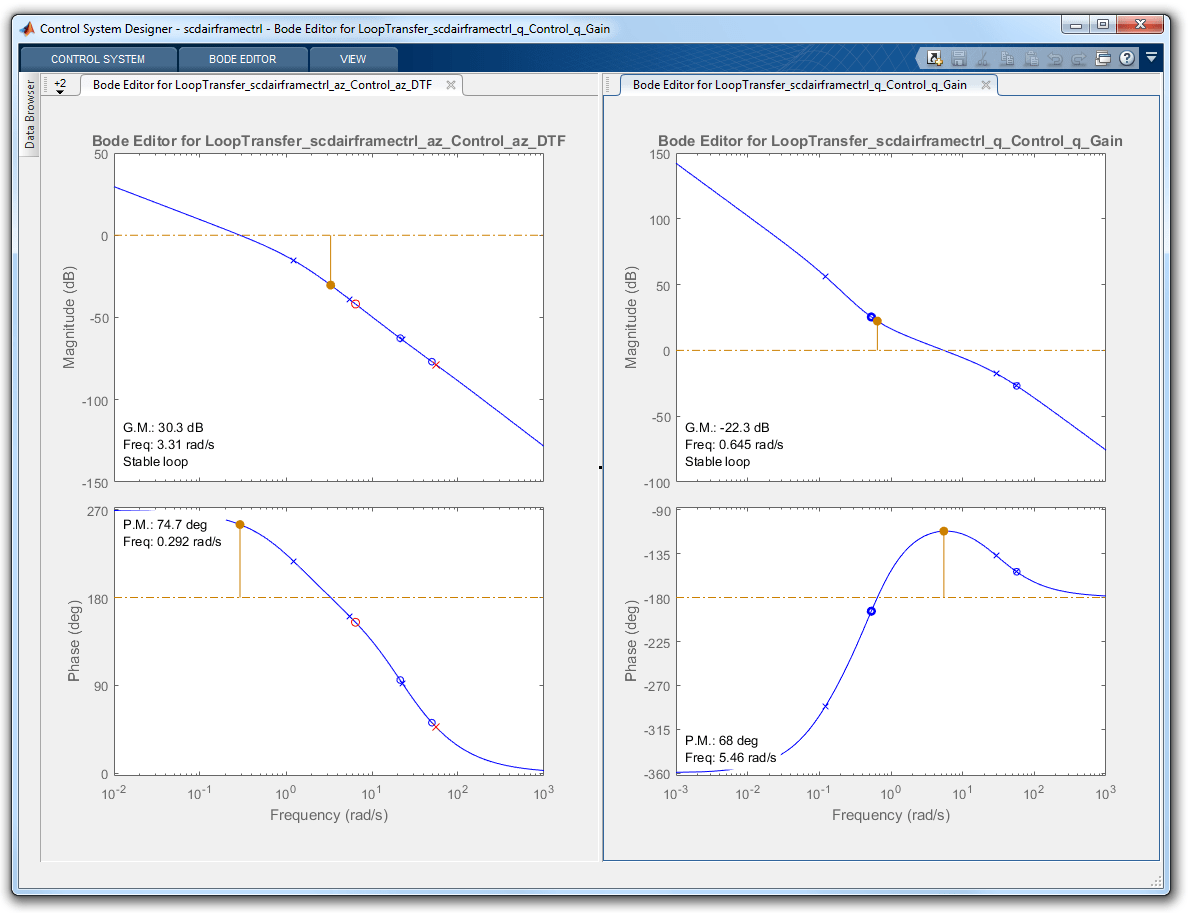
在外循环Bode编辑器图中,循环转发编辑器for woodtransfer_scdairframeCtrl_az_control_az_dtf,通过向上拖动幅度响应来增加反馈循环的增益。内循环Bode编辑器绘图,Bode Editor for LoopTransfer_scdairframeCtrl_q_control_q_gain也改变了。这种变化是反馈回路之间的耦合的结果。一种更系统的方法是首先设计内部反馈回路,外环打开。
要在设计内环时,要消除外环的效果,请将环路开口添加到内环的开环响应。
在里面数据浏览器, 在里面回应区域,右键单击内环响应,然后选择开放式选择。

在“开环传输函数”对话框中,指定SCDAIRFRAMECTRL / AZ控制/ AZ DTF / 1作为环路开口。点击好的。

在外环孔编辑器图中,通过拖动幅度响应来增加增益。由于循环解耦,因此内循环Bode编辑器绘图不会改变。

您现在可以完成内循环的设计,而不会使外环效果,同时设计外循环,同时取得内部循环的效果。
曲调赔偿者
控制系统设计师包含几种调整控制系统的方法:
使用补偿器编辑器手动调整每个补偿器的参数。有关更多信息,请参阅调整使用补金宝app偿器编辑器的Simulink块(金宝appSimulink Control Design)。
使用开放/闭环BODE,根轨迹或NICHOL编辑器图进行图形调整补偿器杆,零和增益。点击调整方法,并选择编辑器图形调整。
使用时间域和频域设计要求优化补偿器参数(需要Simulink Design Optimization™软件)。金宝app点击调整方法,选择基于优化的调谐。有关更多信息,请参阅对单环控制器设计执行时间和频率要求(金宝appSimulink设计优化)。
使用基于诸如闭环时间常数的参数来计算初始补偿器参数。点击调整方法,并选择一个PID调整那内部模型控制(IMC)调谐那循环塑造(需要强大的控制工具箱™软件),或LQG综合。
完整的设计
以下补偿参数满足设计要求:
SCDAIRFRAMECTRL / Q控制/ Q增益:
K_Q = 2.7717622
SCDAirFrameCtrl / AZ控制/ AZ增益:
K_AZ = 0.00027507.
SCDAIRFRAMECTRL / AZ控制/ AZ DTF:
Numerator = [100.109745 -99.109745]分母= [1-0.88893]
闭环系统的响应如下所示:
更新Simul金宝appink模型
要将补偿器参数写回Simulink模型,请单击金宝app更新块。然后,您可以在非线性模型上测试您的设计。
bdclose('scdairframeCtrl')
也可以看看
相关话题
您还可以从以下列表中选择一个网站:
