主要内容
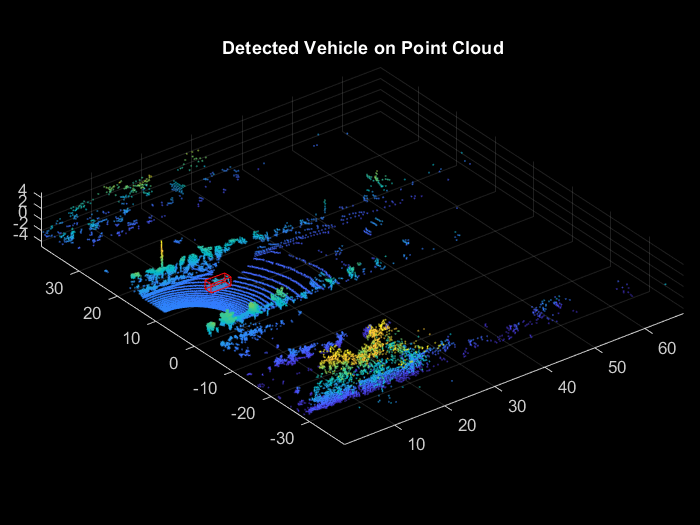
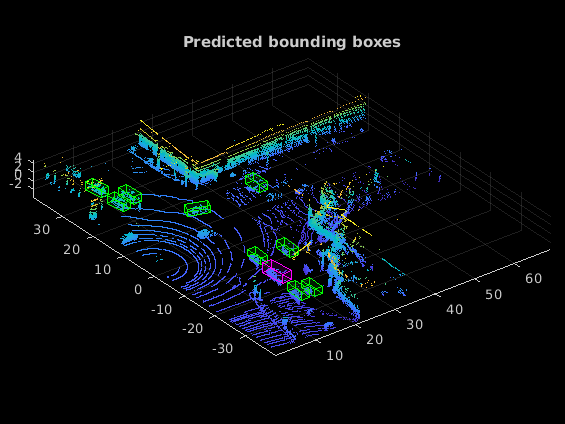
使用深度学习的激光雷达处理
扩展激光雷达点云处理的深度学习工作流
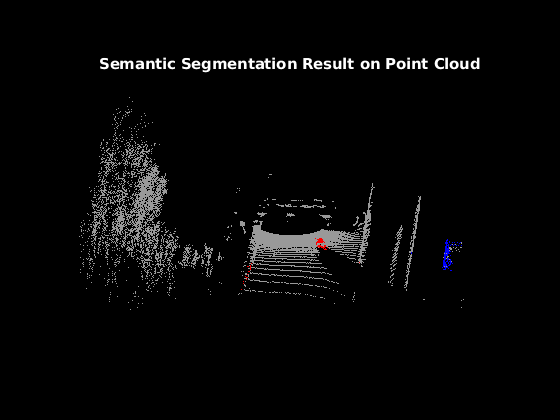
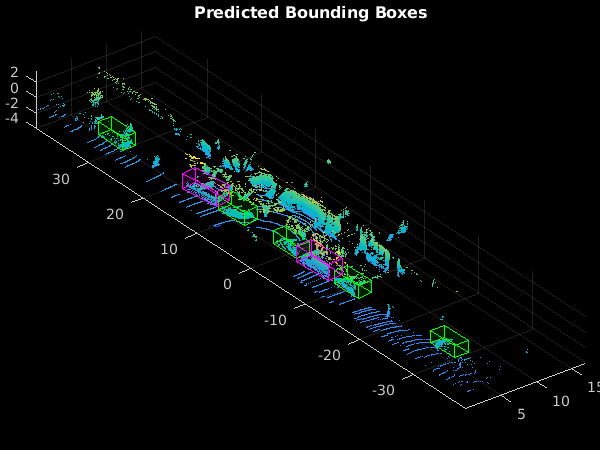
通过使用deep learning Toolbox™和Lidar Toolbox™,应用深度学习算法处理激光雷达点云数据。
应用程序
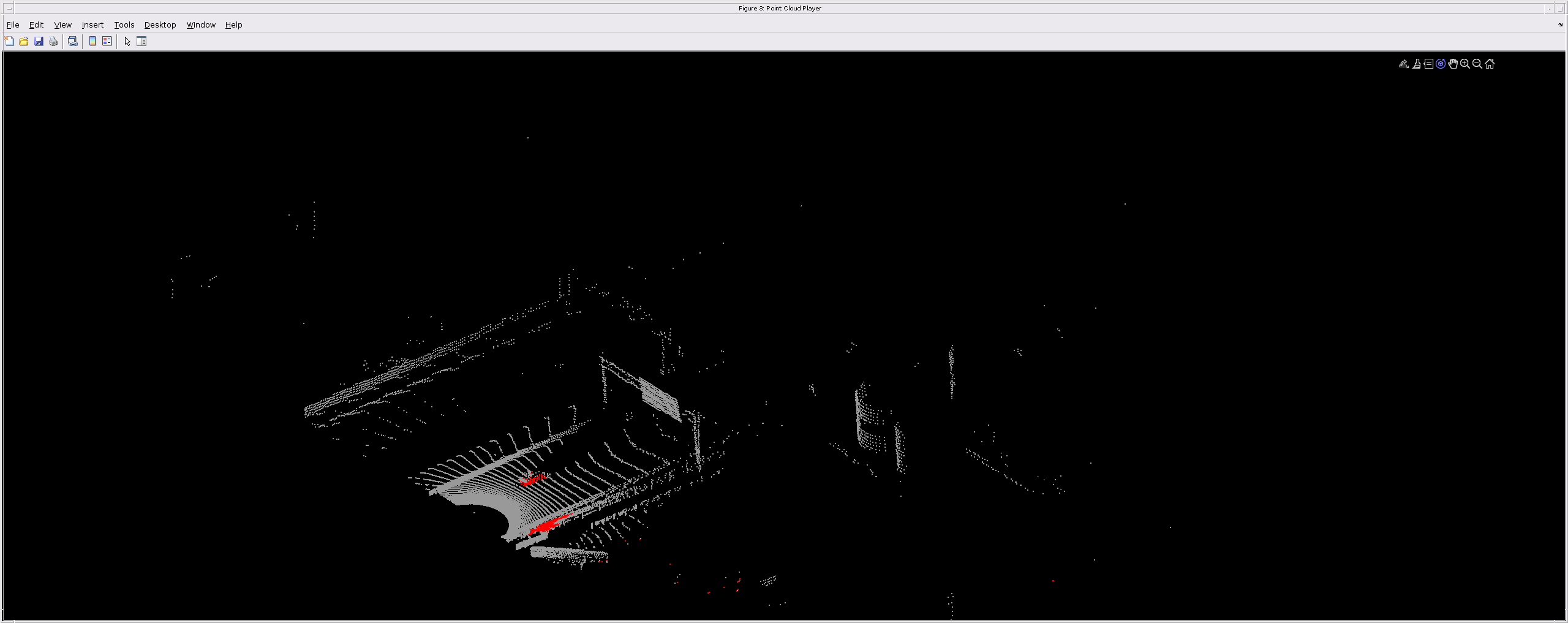
| 激光雷达贴标签机 | 在激光雷达点云中标记地面真值数据 |
功能
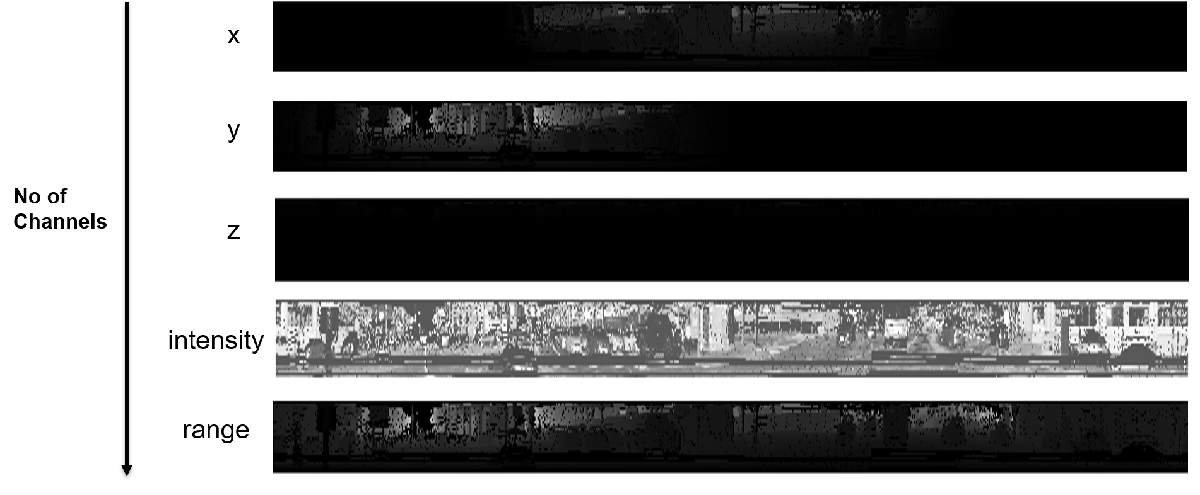
squeezesegv2Layers |
创建SqueezeSegV2分割网络组织激光雷达点云 |
特色的例子


你也可以从以下列表中选择一个网站:
