主要内容
plotCoverageArea
在鸟瞰图上显示传感器覆盖区域
描述
plotCoverageArea (在鸟瞰图上显示自我车辆传感器的覆盖区域。指定传感器的位置、距离、方向角度和视场。覆盖面积绘图仪,caPlotter,位置,范围,取向,fieldOfView)caPlotter,与a有关birdsEyePlot对象并配置传感器覆盖区域的显示。
例子
雷达传感器显示覆盖区域
创建一个鸟瞰图与x-轴范围从0到90米和ay-axis范围从-35米到35米。
cep = birdsEyePlot (“XLim”90年[0],“YLim”35 [-35]);

为鸟瞰图创建一个覆盖区域绘图仪。
caPlotter = coverageAreaPlotter (cep),“DisplayName的”,“雷达覆盖区”);

显示一个覆盖区域,有35度的视野和60米的范围。将覆盖区域传感器安装在原点前方1米处。设置传感器的角度为0度。
mount = [1 0];范围= 60;取向= 0;fieldOfView = 35;
绘制覆盖区域。
plotCoverageArea (caPlotter mountPosition、范围、定位、fieldOfView);

显示车辆四角的传感器覆盖区域
创建一个鸟瞰图与x-axis范围从-100米到100米和ay-axis范围从-100到100米
cep = birdsEyePlot (“XLim”(-100 100),“YLim”100年[-100]);

为车辆上的每个传感器位置创建具有独特显示名称和填充颜色的覆盖区域绘图仪。
rearLeftPlotter = coverageAreaPlotter (cep),“DisplayName的”,“后离开”,“FaceColor”,“r”);rearRightPlotter = coverageAreaPlotter (cep),“DisplayName的”,后正确的,“FaceColor”,“b”);frontLeftPlotter = coverageAreaPlotter (cep),“DisplayName的”,“左前”,“FaceColor”,“y”);frontRightPlotter = coverageAreaPlotter (cep),“DisplayName的”,“前对”,“FaceColor”,‘g’);

设置传感器的位置、距离、方向和视野。传感器的最大射程为90米,视野为30度。绘制覆盖区域。
0.9 plotCoverageArea (rearLeftPlotter[0], 90120年,30);-0.9 plotCoverageArea (rearRightPlotter[0], 90年,-120年,30);plotCoverageArea (frontLeftPlotter[2.8 - 0.9], 90年,60岁,30);plotCoverageArea (frontRightPlotter[2.8 - -0.9], 90年,-60年,30);

输入参数
caPlotter- - - - - -覆盖范围绘图仪
CoverageAreaPlotter对象
覆盖区域绘图仪,指定为CoverageAreaPlotter对象。对象存储在策划者财产的birdsEyePlot对象并配置鸟瞰图中覆盖区域的显示。要创建此对象,请使用coverageAreaPlotter函数。
位置- - - - - -传感器的位置
形式的实值向量[XOriginOffsetYOriginOffset]
传感器在车辆坐标中的位置,指定为形式为[XOriginOffsetYOriginOffset].单位是米。
XOriginOffset指定传感器在原点前面的距离。
YOriginOffset指定传感器到原点左侧的距离。
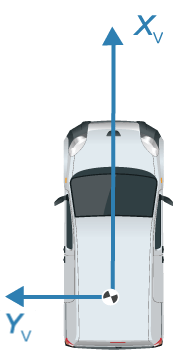
原点位于后桥的中心,如图所示的车辆坐标系统。
范围- - - - - -范围的传感器
积极的真正的标量
传感器的范围,指定为正实标量。单位是米。
取向- - - - - -传感器方位角
真正的标量
传感器相对于X- ego车辆的轴,指定为实标量。单位是度。取向在逆时针方向(向左)为正。
fieldOfView- - - - - -传感器的视野
积极的真正的标量
传感器覆盖区域的视场,指定为正实标量。单位是度。
介绍了R2017a
你也可以从以下列表中选择一个网站:
