birdsEyePlot
绘制车辆周围的检测,轨道和传感器覆盖
描述
这birdsEyePlot物体显示了一个二维驾驶场景的鸟瞰图,就在一辆自我汽车的附近。您可以使用这个图与传感器,能够检测对象和车道。
在鸟瞰图上显示驾驶场景的各个方面:
创建一个
birdsEyePlot对象。为您想要绘制的驱动场景的各个方面创建绘图器。
使用具有相应绘图功能的绘图仪以显示鸟瞰图上的这些方面。
此表显示了基于您想要绘制的驾驶场景方面使用的绘图仪函数。
| 驱动场景方面的情节 | 绘图机创建函数 | 绘图机显示功能 |
|---|---|---|
| 传感器覆盖区域 | coverageAreaPlotter |
plotCoverageArea |
| 传感器检测 | 检测普勒 |
plotDetection |
| 车道边界 | LaneBoundaryPlotter. |
plotlaneboundary. |
| 车道标记 | lanemarkingplotter. |
plotLaneMarking |
| 对象网格 | meshPlotter |
plotMesh |
| 对象概述 | Outlineplotter. |
Plot led.那plotbarrieroutline. |
| 自我车辆路径 | pathPlotter |
plotpath. |
| 点云 | Pointcloudplotter. |
PlotPointCloud. |
| 对象跟踪结果 | trackPlotter |
plotTrack |
有关如何配置和使用鸟瞰图的示例,请参见可视化传感器覆盖,检测和轨道。
创建
特性
父母-用于绘图的轴
轴处理
图绘制的轴,指定为轴手柄。默认情况下,birdsEyePlot对象使用当前的轴柄,由此返回GCA.功能。
策划者-为鸟瞰图创建的绘图仪
绘图仪对象数组
为鸟瞰图创建的绘图器,指定为绘图器对象数组。
xlimits.-X-AXIS范围
形式的实值向量[X闵X马克斯]
X鸟瞰图的轴范围,以车辆坐标为单位,指定为形式为[X闵X马克斯]。单位是米。如果您未指定xlimits.,然后绘图使用父轴的默认值。
这X-轴是垂直和正面的自我车辆的前进方向。原点在自我车辆后轴的中心。

有关鸟瞰图中使用的坐标系的更多详细信息,请参阅车辆坐标系。
吉姆斯-y-AXIS范围
形式的实值向量[y闵y马克斯]
y鸟瞰图的轴范围,以车辆坐标为单位,指定为形式为[y闵y马克斯]。单位是米。如果您未指定吉姆斯,然后绘图使用父轴的默认值。
这y-轴水平运行,在自我车辆的左边为正,这是在向前时看到的。原点在自我车辆后轴的中心。

有关所用坐标系的更多详细信息birdsEyePlot对象,参见车辆坐标系。
对象功能
例子
创建和显示鸟瞰图
创建一个鸟瞰图与X-轴范围从0到90米和ay-XIS范围从-35到35米。
cep = birdsEyePlot (“XLim”90年[0],'ylim'35 [-35]);
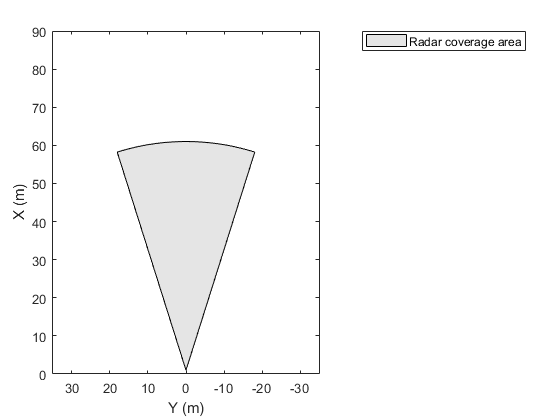
显示一个覆盖区域的35度视场和60米的范围。
caplotter = cockageAleaplotter(BEP,'显示名称'那“雷达覆盖区”);mount = [1 0];范围= 60;取向= 0;fieldOfView = 35;plotCoverageArea (caPlotter mountPosition、范围、定位、fieldOfView);
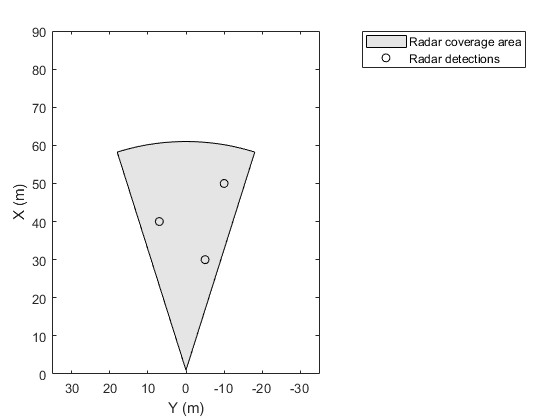
显示雷达探测坐标在(30,-5),(50,-10)和(40,7)。
Radarplotter = DetectionPlotter(BEP,'显示名称'那雷达信号检测的);plotdetection(radarplotter,[30 -5; 50 -10; 40 7]);
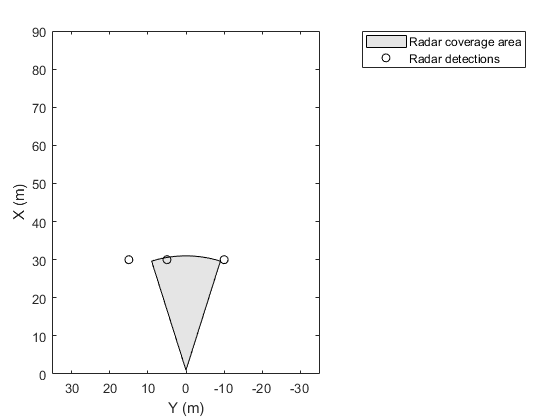
使用覆盖区域和检测绘图仪创建鸟瞰图
创建一个鸟瞰图与X- XIS范围为0到90米y-XIS范围从-35到35米。配置绘图以包括雷达覆盖区域绘图仪和检测绘图仪。设置这些绘图仪的显示名称。
cep = birdsEyePlot (“XLim”90年[0],'ylim'35 [-35]);coverageAreaPlotter (cep'显示名称'那“雷达覆盖区”);DetectionPlotter(BEP,'显示名称'那雷达信号检测的);
使用Findplotter.通过其显示名称定位绘图仪。
caPlotter = findPlotter (cep),'显示名称'那“雷达覆盖区”);radarplotter = findplotter(bep,'显示名称'那雷达信号检测的);
绘制覆盖区域和检测对象。
PlotcoverageArea(烧结裤,[1 0],30,0,35);plotdetection(射线翻转器,[30 5; 30 -10; 30 15]);
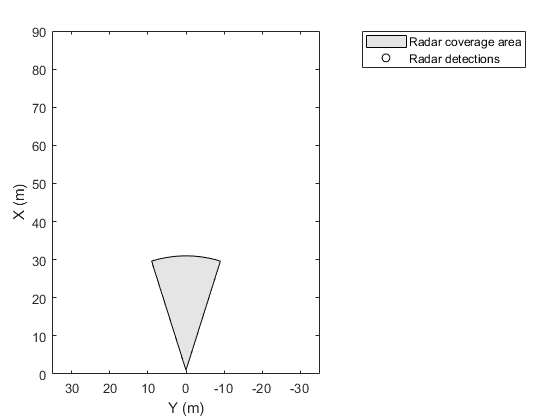
从绘图中清除数据。
clearPlotterData (cep);
限制
矩形缩放功能(绘制一个矩形以放大图形的某一部分)在鸟瞰图图形中不起作用。
更多关于
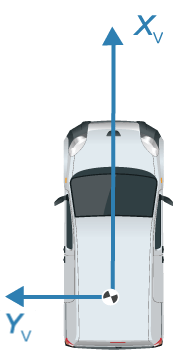
车辆坐标系
这birdsEyePlot使用车辆坐标系(XV.那yV.), 在哪里:
这XV.- 从自助式车辆前进。
这yV.-axis指向左边,当向前看的时候。
原点在自我载体旋转的中心。这一点是在路面上,在自我车辆后轴中心的下方。
有关车辆坐标系的更多详细信息,请参阅自动化驾驶工具箱中的坐标系。
你也可以从以下列表中选择一个网站:
