pointCloudPlotter
用于鸟瞰图的点云绘图仪
描述
例子
生成多角色激光雷达点云数据
生成具有多个参与者的驾驶场景的激光雷达点云数据lidarPointCloudGenerator系统对象。通过使用创建驾驶场景drivingScenario对象。它包含一辆自我车、行人和另外两辆车。
创建并绘制有多辆车的驾驶场景
创建一个驾驶场景。
scenario = drivingScenario;
在驾驶场景中添加一条笔直的道路。这条路每个方向都有一条车道。
roadCenters = [0 0 0;70 0 0];lanspecification = lanespec([1 1]);路(场景、roadCenters“道”, laneSpecification);
在驾驶场景中添加一辆自我车辆。
egoVehicle =车辆(场景,“ClassID”, 1“网”, driving.scenario.carMesh);路径点= [1 -2 0;35 -2 0];smoothTrajectory (egoVehicle锚点10);
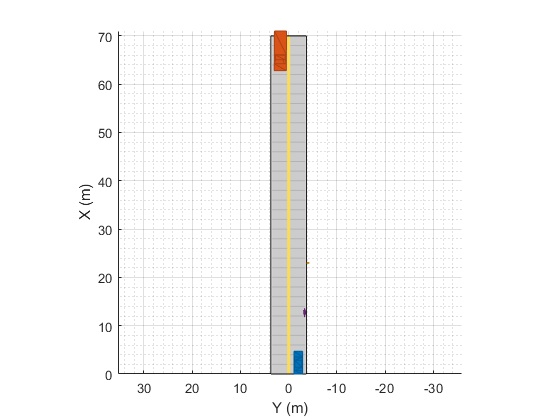
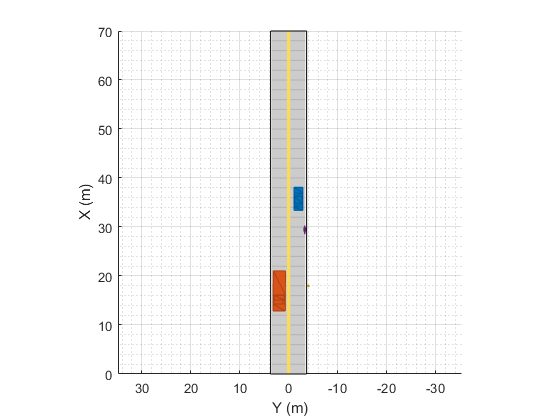
在驾驶场景中添加卡车、行人和自行车,并绘制场景。
卡车=车辆(场景,“ClassID”2,“长度”, 8.2,“宽度”, 2.5,“高度”, 3.5,...“网”, driving.scenario.truckMesh);路点= [70 1.7 0;20 1.9 0];smoothTrajectory(卡车,锚点,15);行人=演员(场景,“ClassID”4“长度”, 0.24,“宽度”, 0.45,“高度”, 1.7,...“网”, driving.scenario.pedestrianMesh);路点= [23 -4 0;10.4 -4 0];smoothTrajectory(行人,锚点,1.5);自行车=演员(场景,“ClassID”3,“长度”, 1.7,“宽度”, 0.45,“高度”, 1.7,...“网”, driving.scenario.bicycleMesh);路点= [12.7 -3.3 0;49.3 -3.3 0];smoothTrajectory(自行车、锚点、5);情节(场景中,“网格”,“上”)
生成并绘制激光雷达点云数据
创建一个lidarPointCloudGenerator系统对象。
lidar = lidarPointCloudGenerator;
将参与者配置文件和自我车辆参与者ID从驾驶场景添加到System对象。
激光雷达。ActorProfiles = ActorProfiles(场景);激光雷达。EgoVehicleActorID = egoVehicle.ActorID;
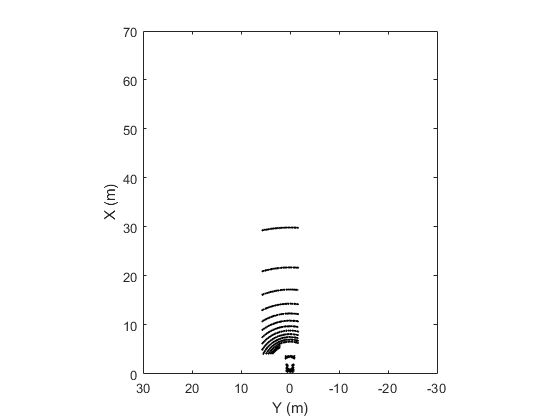
绘制点云数据。
bep = birdsEyePlot(“Xlimits”70年[0],“YLimits”[-30] 30日);绘图仪= pointCloudPlotter(bep);传奇(“关闭”);而advance(scenario) tgts = targetpose (egoVehicle);rdmesh = roadMesh(egoVehicle);[ptCloud,isValidTime] = lidar(tgts,rdmesh,scenario.SimulationTime);如果isValidTime plotPointCloud(绘图仪,ptCloud);结束结束
输入参数
cep- - - - - -鸟瞰的情节
birdsEyePlot对象
鸟瞰图,指定为birdsEyePlot对象。
名称-值参数
的可选逗号分隔对名称,值参数。的名字参数名称和价值对应的值。的名字必须出现在引号内。您可以以任意顺序指定多个名称和值对参数Name1, Value1,…,的家.
“DisplayName”、“点云”将出现在鸟瞰图图例中的显示名称设置为“点云”。
DisplayName- - - - - -要在图例中显示的绘图仪名称
”(默认)|特征向量|字符串标量
要在图例中显示的绘图仪名称,指定为逗号分隔的对,由“DisplayName的”和字符向量或字符串标量。如果未指定名称,则鸟瞰图不会显示绘图器的图例条目。
数据类型:字符|字符串
PointSize- - - - - -点云中点的标记大小
6(默认)|正整数
点云中点的标记的大小,指定为逗号分隔的对,由“PointSize”一个正整数。
颜色- - - - - -点填充颜色
“没有”(默认)|RGB值|十六进制颜色代码|颜色名称|短颜色名
点填充颜色,指定为由逗号分隔的对组成“颜色”以及RGB三元组、十六进制颜色代码、颜色名称或短颜色名称。
对于自定义颜色,请指定RGB三元组或十六进制颜色代码。
RGB三元组是一个三元素行向量,其元素指定颜色的红、绿和蓝分量的强度。强度必须在这个范围内
[0, 1];例如,[0.4 0.6 0.7].十六进制颜色码是字符向量或以散列符号(
#)后面跟着三个或六个十六进制数字,取值范围为0来F.这些值不区分大小写。因此,颜色代码“# FF8800”,“# ff8800”,“# F80”,“# f80”是等价的。
或者,您可以通过名称指定一些常用颜色。该表列出了已命名的颜色选项、等效的RGB三元组和十六进制颜色代码。
| 颜色名称 | 短名称 | RGB值 | 十六进制颜色代码 | 外观 |
|---|---|---|---|---|
“红色” |
“r” |
[10 0 0] |
“# FF0000” |
|
“绿色” |
‘g’ |
[0 10 0] |
“# 00 ff00” |
|
“蓝” |
“b” |
[0 0 1] |
“# 0000 ff” |
|
“青色” |
“c” |
[0 1 1] |
“# 00飞行符” |
|
“红色” |
“米” |
[10 0 1] |
“#就” |
|
“黄色” |
“y” |
[11 10 0] |
“# FFFF00” |
|
“黑” |
“k” |
[0 0 0] |
# 000000的 |
|
“白色” |
' w ' |
[1 1 1] |
“# FFFFFF” |
|
“没有” |
不适用 | 不适用 | 不适用 | 没有颜色 |
这里是RGB三组和十六进制的颜色代码的默认颜色MATLAB®在许多类型的图中使用。
| RGB值 | 十六进制颜色代码 | 外观 |
|---|---|---|
[0 0.4470 0.7410] |
“# 0072 bd” |
|
[0.8500 0.3250 0.0980] |
“# D95319” |
|
[0.9290 0.6940 0.1250] |
“# EDB120” |
|
[0.4940 0.1840 0.5560] |
“# 7 e2f8e” |
|
[0.4660 0.6740 0.1880] |
“# 77 ac30” |
|
[0.3010 0.7450 0.9330] |
“# 4 dbeee” |
|
[0.6350 0.0780 0.1840] |
“# A2142F” |
|
标签- - - - - -与绘图仪对象关联的标记
的绘图机N'(默认)|特征向量|字符串标量
N'标记与绘图器对象关联,指定为逗号分隔的对,由“标签”和字符向量或字符串标量。默认值为的绘图机,在那里N'N是一个整数,对应于N与输入相关的绘图仪birdsEyePlot对象。
输出参数
您也可以从以下列表中选择一个网站:
