plotdetection.
在鸟瞰图上显示目标探测
语法
描述
plotDetection (从鸟瞰图上的目标位置列表中显示目标检测。检测绘图机,detPlotter,姿势)detPlotter,与a相关联Birdseyebplot.对象并配置指定检测的显示。
去除与检测绘图仪相关的所有检测detPlotter,打电话给cleardata.功能和指定detPlotter作为输入参数。
plotDetection (在鸟瞰图上显示探测结果和它们的速度。detPlotter,姿势,速度)
plotDetection (在鸟瞰图上显示探测结果和它们的标签。detPlotter,姿势,标签)
plotDetection (在鸟瞰图上显示检测及其速度和标签。detPlotter,姿势,速度,标签)速度和标签可以出现在任何一个顺序,但必须在后面detPlotter和姿势.
例子
创建并显示鸟瞰图
用一个鸟的眼睛绘制x-axis范围从0到90米和ay-axis范围从-35米到35米。
cep = birdsEyePlot ('xlim'90年[0],“YLim”35 [-35]);
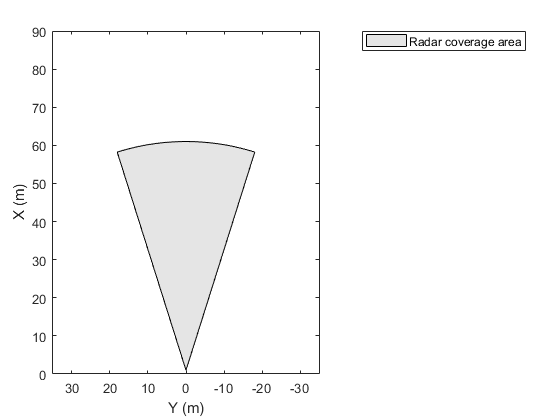
显示带有35度视场的覆盖区域和60米范围。
caPlotter = coverageAreaPlotter (cep),“DisplayName的”,'雷达覆盖区域');mount = [1 0];范围= 60;取向= 0;fieldOfView = 35;plotCoverageArea (caPlotter mountPosition、范围、定位、fieldOfView);
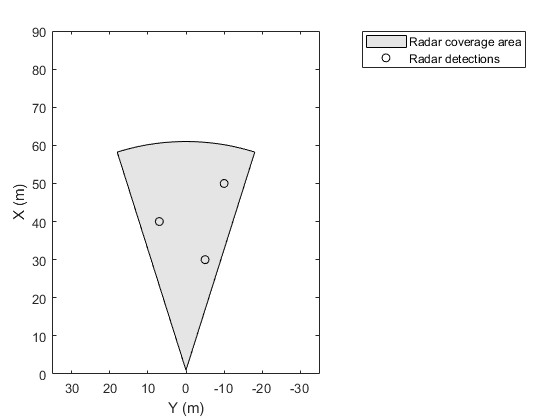
在(30,-5),(50,-10)和(40,7)的坐标显示雷达检测。
radarPlotter = detectionPlotter (cep),“DisplayName的”,'雷达检测');plotDetection (radarPlotter [30 5;50 -10;40 7]);
在鸟眼图上创建和显示标记检测
用一个鸟的眼睛绘制x-axis范围从0到90米和ay-axis范围从-35米到35米。创建一个以蓝色显示探测结果的雷达探测绘图仪。
cep = birdsEyePlot ('xlim'90年[0],“YLim”35 [-35]);detPlotter = detectionPlotter (cep),“DisplayName的”,'雷达检测',...“MarkerFaceColor”,“b”);
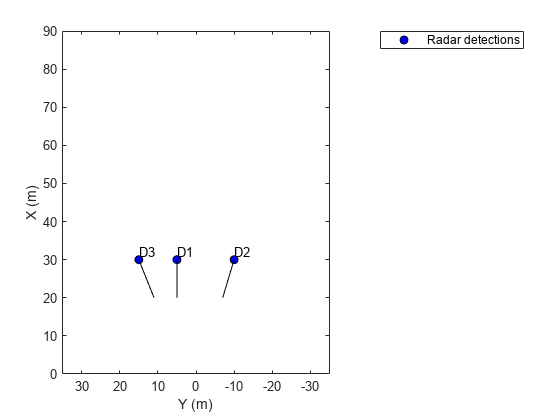
显示三个标记检测的位置和速度。
头寸= [30 5;30 -10;30 15];速度= [-10 0;-10 3;-10 4];标签= {'d1','D2',“D3”};plotdetection(剥离,位置,速度,标签);
输入参数
detPlotter- - - - - -检测绘图仪
检测普勒对象
检测绘图仪,指定为检测普勒目的。该对象存储在策划者财产的Birdseyebplot.对象,并配置鸟眼图中指定检测的显示。要创建此对象,请使用detectionPlotter函数。
姿势- - - - - -被测物体位置
米2实值矩阵
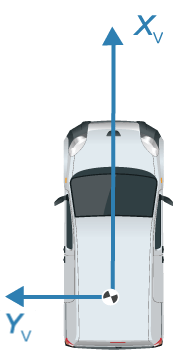
被检测物体在车辆坐标中的位置,指定为米-2-2实值矩阵(X,Y)的位置。米为检测到的对象个数。积极的X-方向指向车辆中心的前方。积极的Y-direction指向车辆原点的左侧,即后轴的中心,如图所示。
速度- - - - - -被检测物体的速度
米2实值矩阵
被检测物体的速度,指定为米-2(2)的2实值矩阵(X,Y) 方向。米为检测到的对象个数。速度被绘制为源自检测的中心位置的线向量,因为它们被跟踪。
标签- - - - - -检测标签
米长度的字符串数组|米- 字符向量的长小区数组
检测标签,指定为米-length字符串数组或米字符向量的长度单元数组。米为检测到的对象个数。标签对应于姿势矩阵。默认情况下,检测没有标签。要删除与检测绘图仪关联的所有注释和标签,请使用cleardata.函数。
您还可以从以下列表中选择一个网站:
