drivingScenario
建立驾驶场景
描述
该drivingScenario对象表示含有道路,车辆,行人,以及驱动方案的其它方面,3-d竞技场。使用此对象模型逼真通信量的情况,并且生成用于测试控制器或传感器融合算法合成检测。
还可以通过使用驾驶场景设计师另外,你还可以导出drivingScenario对象生成场景变化,以在应用程序或Simulink中使用金宝app®。有关更多细节,请参见以编程方式创建驾驶场景变化。
创建
属性
对象函数
例子
创建具有多个参与者和道路的驾驶场景
创建一个包含弯道,两米连胜的道路,和两位演员的驱动场景:一辆汽车和一辆自行车。既是演员沿着60秒的道路移动。
创建驱动脚本对象。
场景= drivingScenario (“SampleTime”0.1' ,“停止时间”、60);
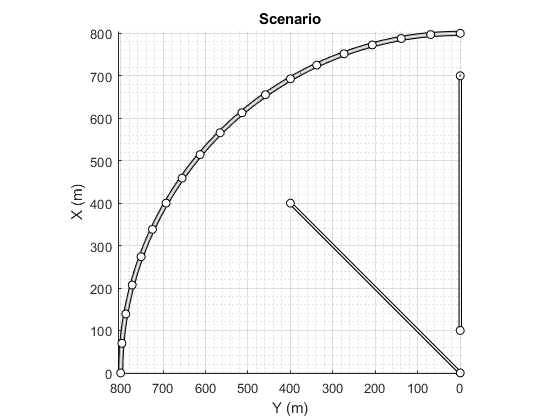
创建使用道路中心点的圆的,以800米半径圆弧沿弯曲的道路。电弧开始在0℃,在90°的端部,并且在5℃的增量进行采样。
angs = [0:5:90]';R = 800;roadcenters = R * [COSD(angs)信德(angs)零(大小(angs))];roadwidth = 10;路(场景,roadcenters,roadwidth);
添加两个直路与默认宽度,在每一端使用道路中心点。
道路中心= [700 00;100 0 0];道路(场景,道路中心)道路中心= [400 400 0;0 0 0];路(场景,roadcenters)
确定道路边界。
rbdry = roadBoundaries(场景);
在场景中添加一辆汽车和一辆自行车。将车停在第一条直路的起点。
汽车=车辆(的情况下,'位置'(700 0 0),“长度”3,“宽度”2,'高度',1.6);
自行车越往下的道路位置。
自行车=演员(场景中,'位置',(706 376 0)',“长度”2,“宽度”,0.45,'高度',1.5);
绘制场景。
情节(场景中,“中心线”,'上',“RoadCenters”,'上');标题(“方案”);
显示演员的姿势和个人资料。
姿势= actorPoses(场景)
提出了=2×1带字段的结构数组:的actorId位置速度辊距偏航AngularVelocity
型材= actorProfiles(场景)
概要文件=2×1带字段的结构数组:actorId来的ClassID长度宽度高度OriginOffset MeshVertices MeshFaces RCSPattern RCSAzimuthAngles RCSElevationAngles
展目标概述了驾驶情景模拟
创建一个驾驶场景,并显示随着模拟的进展目标如何概述变化。
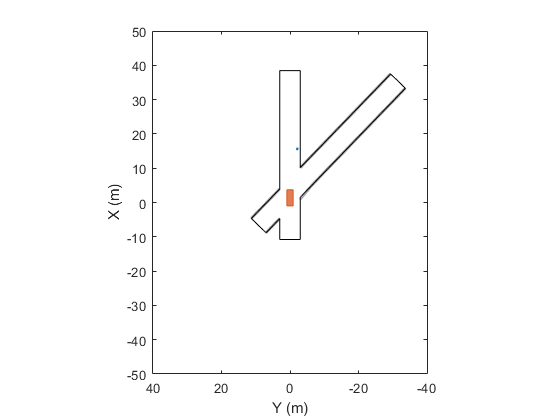
创建一个由两个相交的直路的驱动方案。第一个路段长有45米第二个直道长32米和相交的第一条公路。一辆汽车以每秒12.0米沿着第一道路行驶接近运行行人过的交点以每秒2.0米。
场景= drivingScenario (“SampleTime”,0.1%,“停止时间”,1);路(场景中,[ - 10 0 0 45 -20 0]);路(场景中,[ - 10 -10 0 35 10 0]);PED =演员(的情况下,“长度”,0.4,“宽度”,0.6,'高度',1.7);车=车辆(场景);pedspeed = 2.0;carspeed = 12.0;轨迹(ped [15 3 0;15日3 0],pedspeed);轨迹(车,-10 -10 0;35 10 0],carspeed);
创建车辆的以自我为中心的追逐情节。
chasePlot(车,“中心线”,'上')

创建一个空的鸟瞰图和添加一个轮廓绘图和车道边界绘图仪。然后,运行模拟。在每个模拟步骤:
更新追逐图,显示道路边界和目标轮廓。
更新鸟瞰图以显示更新的道路边界和目标轮廓。情节视角总是与自我载体有关。
bepPlot = birdsEyePlot('XLIM'50 [-50],'YLim',40 [-40]);outlineplotter = outlineplotter (bepPlot);laneplotter = laneBoundaryPlotter (bepPlot);传奇(“关闭”)而advance(scenario) rb =道路边界(car);(位置、偏航、长度、宽度、originOffset color] = targetOutlines(车);plotLaneBoundary (laneplotter, rb) plotOutline (outlineplotter、位置、偏航、长度、宽度、…“OriginOffset”,originOffset,“颜色”,颜色)暂停(0.01)结束

生成目标和车道边界检测
创建一个包含自我车辆和目标车辆沿着三车道道路行驶的驾驶场景。使用视觉检测生成器检测车道边界。
场景= drivingScenario;
使用车道规范创建一个三车道的道路。
roadCenters = [0 0 0;60 0 0;120 30 0];LSPC = lanespec(3);路(场景,roadCenters,“道”,lspc);
指定该自身车辆跟随中心车道在30米/秒。
egovehicle =车辆(场景);egopath = [1.5 0 0;60 0 0;111年25 0];egospeed = 30;轨迹(egovehicle egopath egospeed);
指定目标车辆以40米/秒的速度在ego车辆前面行驶,并在ego车辆附近改变车道。
targetcar =车辆(场景中,'班级号',2);TARGETPATH = [8 2;60 -3.2;120 33];targetspeed = 40;轨迹(targetcar,TARGETPATH,targetspeed);
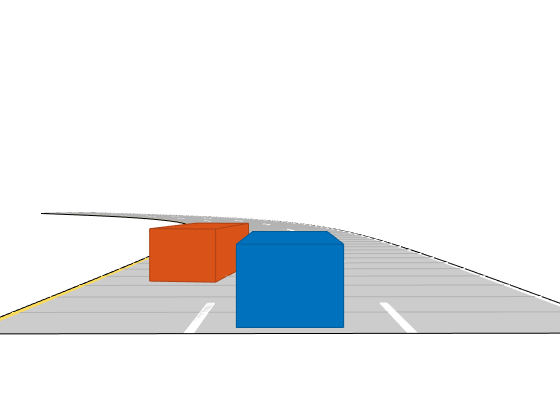
显示追逐情节,从后面的自我车辆的三维场景。
chasePlot (egovehicle)
创建视觉检测发电机检测车道和对象。传感器的间距向下指向一个程度。
visionSensor = visionDetectionGenerator (“节”,1.0);visionSensor。DetectorOutput =车道和对象的;visionSensor。演员Profiles = actorProfiles(scenario);
运行仿真。
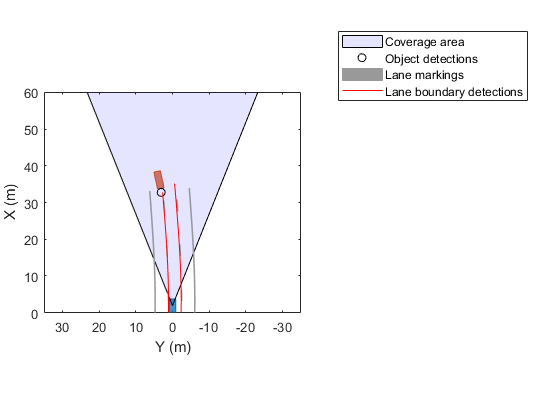
创建一个鸟瞰图和相关的绘图仪。
显示传感器覆盖区域。
显示行车线标记。
在道路上获得目标的地面真实姿态。
在前方60米处获得理想的车道边界点。
从理想目标位姿和车道边界生成检测。
显示目标的轮廓。
显示对象检测当所述对象检测是有效的。
当车道检测有效时显示车道边界。
cep = birdsEyePlot ('XLIM',[0 60],'YLim'35 [-35]);caPlotter = coverageAreaPlotter (cep),“DisplayName的”,“覆盖范围”,…'FaceColor',“蓝”);detPlotter = detectionPlotter (cep),“DisplayName的”,“对象检测”);lmPlotter = laneMarkingPlotter (cep),“DisplayName的”,“车道标记”);lbPlotter = laneBoundaryPlotter (cep),“DisplayName的”,…“车道边界检测”,“颜色”,'红色');olPlotter = outlinePlotter (cep);plotCoverageArea (caPlotter visionSensor.SensorLocation,…visionSensor.MaxRange visionSensor.Yaw,…visionSensor.FieldOfView (1));而advance(scenario) [lmv,lmf] = laneMarkingVertices(egovehicle);plotLaneMarking(lmPlotter,lmv,lmf) tgtpose = targetpose (egovehicle);lookaheadDistance = 0:0.5:60;磅= laneBoundaries (egovehicle,'XDistance'lookaheadDistance,'的locationType','内');[obdets, nobdets obValid、lb_dets nlb_dets, lbValid] =…visionSensor (tgtpose磅,scenario.SimulationTime);[objposition, objyaw objlength、objwidth objoriginOffset, color] = targetOutlines (egovehicle);plotOutline (olPlotter、objposition objyaw、objlength objwidth,…“OriginOffset”,objoriginOffset,“颜色”、颜色)如果obValid detPos = cellfun(@(d)d. measurement (1:2),obdets,“UniformOutput”,假);detPos = vertcat(零(0,2),cell2mat(detPos ')');plotDetection(detPlotter,detPos)结束如果lbValid plotLaneBoundary (lbPlotter vertcat (lb_dets.LaneBoundaries))结束结束

算法
也可以看看
应用程序
对象
介绍了在R2017a
[1]你需要和……签订一份单独的协议这里为了获得对HDLM服务的访问权,并获得使用HERE服务所需的凭证(app_id和app_code)。
你也可以从以下列表中选择一个网站:
