radarDetectionGenerator
为驾驶场景生成雷达探测
radarDetectionGenerator不建议使用,除非你需要C / c++代码生成。使用drivingRadarDataGenerator代替。有关更多信息,请参见兼容性的考虑。
描述
的radarDetectionGenerator从雷达系统对象™生成检测传感器安装在一个自我。所有的检测都是自我的参考坐标系统。您可以使用radarDetectionGenerator对象包含演员和轨迹在一个场景中,您可以创建使用drivingScenario对象。对象可以模拟真实的检测与添加随机噪声并生成错误的报警检测。此外,您可以使用radarDetectionGenerator对象创建的输入multiObjectTracker。在构建场景使用驾驶场景设计师应用,雷达传感器安装在自我车辆输出radarDetectionGenerator对象。
生成雷达检测:
创建
radarDetectionGenerator对象并设置其属性。调用对象的参数,就好像它是一个函数。
了解更多关于系统对象是如何工作的,看到的系统对象是什么?。
创建
属性
使用
描述
(还返回的有效的检测报告,依据,numValidDets)=传感器(演员,时间)numValidDets。
(返回一个逻辑值,依据,numValidDets,isValidTime)=传感器(演员,时间)isValidTime,这表明UpdateInterval时间已经过去。
输入参数
输出参数
对象的功能
使用一个目标函数,指定系统对象作为第一个输入参数。例如,释放系统资源的系统对象命名obj使用这个语法:
发行版(obj)
例子
生成雷达检测多个车辆
生成使用前置汽车雷达安装在一个自我检测车辆。假设有三个目标:
车辆1是在中间车道,自我车辆正前方,以同样的速度开车。
车2是在左边的车道,车辆行驶速度比自我12公里每小时。
车3是在正确的车道,车辆行驶慢于自我5公里每小时。
所有位置、速度和测量是相对于自我。运行仿真的十个步骤。
dt = 0.1;pos1 = (150 0 0);pos2 = (160 10 0);pos3 = (130 -10 0);vel1 = (0 0 0);vel2 = (12 * 1000/3600 0 0);vel3 = (5 * 1000/3600 0 0);car1 =结构(“ActorID”,1“位置”pos1,“速度”,vel1);car2 =结构(“ActorID”2,“位置”pos2,“速度”,vel2);car3 =结构(“ActorID”3,“位置”pos3,“速度”,vel3);
创建一个汽车雷达传感器,从自我抵消车辆。默认情况下,传感器的位置是在(3.4,0)米的车辆中心和飞机离地面0.2米。关闭率计算范围,雷达传感器措施的位置。
雷达= radarDetectionGenerator (“DetectionCoordinates”,传感器笛卡儿的,…“MaxRange”,200,“RangeResolution”10“AzimuthResolution”10…“FieldOfView”,40 [15],“UpdateInterval”,dt,“HasRangeRate”、假);追踪= multiObjectTracker (“FilterInitializationFcn”@initcvkf,…“ConfirmationThreshold”(3 - 4),“DeletionThreshold”6 [6]);
从non-ego生成与雷达探测车辆。输出检测形成一个单元阵列,可以直接传递到multiObjectTracker。
simTime = 0;nsteps = 10;为k = 1: nsteps侦破=雷达([car1 car2 car3], simTime);[confirmedTracks, tentativeTracks allTracks] = updateTracks(记录、侦破、simTime);
汽车一个时间步和更新的多目标跟踪。
simTime = simTime + dt;car1。位置= car1。位置+ dt*car1.Velocity; car2.Position = car2.Position + dt*car2.Velocity; car3.Position = car3.Position + dt*car3.Velocity;结束
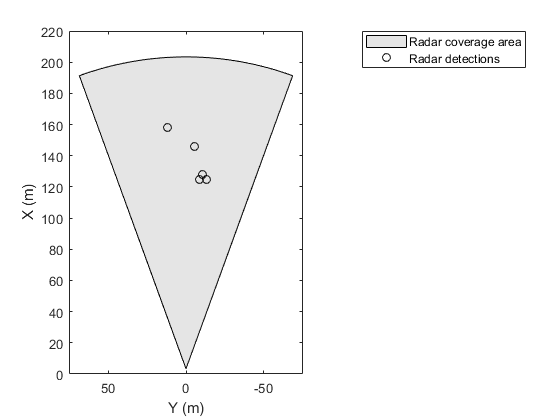
使用birdsEyePlot创建一个俯视的检测。传感器覆盖范围。提取X和Y通过将目标的位置测量单元阵列的字段为MATLAB®数组中。显示检测鸟瞰的阴谋。
BEplot = birdsEyePlot (“XLim”220年[0],“YLim”75年[-75]);caPlotter = coverageAreaPlotter (BEplot,“DisplayName的”,“雷达覆盖区”);plotCoverageArea (caPlotter radar.SensorLocation radar.MaxRange,…radar.Yaw radar.FieldOfView (1) detPlotter = detectionPlotter (BEplot,“DisplayName的”,雷达信号检测的);detPos = cellfun (@ (d) d.Measurement(1:2),精细,“UniformOutput”、假);detPos = cell2mat (detPos ') ';如果~ isempty (detPos) plotDetection (detPlotter detPos)结束
兼容性的考虑
radarDetectionGenerator系统对象和雷达检测发电机块不推荐
不推荐在R2021a开始
的radarDetectionGenerator系统对象和雷达检测发电机屏蔽不推荐,除非你要求C / c++代码生成。相反,使用drivingRadarDataGenerator系统对象和驾驶雷达数据生成器,分别。这些新的雷达传感器提供额外的属性建模雷达传感器,包括生成跟踪和集群检测的能力。
没有删除当前计划radarDetectionGenerator系统对象或雷达检测发电机块。MATLAB代码和仿真软件金宝app®模型,使用这些功能将继续运行。你仍然可以进口radarDetectionGenerator对象进驾驶场景设计师应用。然而,这个应用程序更新进口传感器的参数反映的参数drivingRadarDataGenerator对象。此外,当你一个场景包含一个出口radarDetectionGenerator传感器或仿真软件MATLAB代码模型,应用传感器作为一个出口金宝appdrivingRadarDataGenerator对象或驾驶雷达数据生成器块,分别。
在MATLAB代码中,取代的所有实例radarDetectionGenerator与drivingRadarDataGenerator。此外,更新所有radarDetectionGenerator属性与等效drivingRadarDataGenerator属性,如表所示。表中未列出的属性是特定的唯一drivingRadarDataGenerator或相同的对象。
radarDetectionGenerator属性 |
等效drivingRadarDataGenerator属性 |
|---|---|
|
|
|
|
|
|
|
RangeLimits |
|
|
|
|
|
|
此表显示了创建一个示例代码drivingRadarDataGenerator对象,而不是一个radarDetectionGenerator对象。
| 不使用 | 建议更换 |
|---|---|
雷达= radarDetectionGenerator (…“SensorLocation”(1 0),…“高度”,0.2,…“偏航”,180,…“节”0,…“滚”0,…“MaxRange”,50); |
雷达= drivingRadarDataGenerator (…“MountingLocation”(1 0 0。0.2),…“MountingAngles”(180 0 0),…“RangeLimits”,50 [0]); |
从目标提出了在每个生成检测仿真时间步,取代依据= radarDetectionGenerator(目标、时间)语法与依据= drivingRadarDataGenerator(目标、时间)。
在仿真金宝app软件模型,代替所有雷达检测发电机块与驾驶雷达数据生成器块。在驾驶雷达数据生成器块,更新参数值以同样的方式你会更新drivingRadarDataGenerator属性值描述的更新代码部分。
如果你的模型包含一个单独的块,集群检测,你可以删除它,因为驾驶雷达数据生成器阻止默认集群检测。
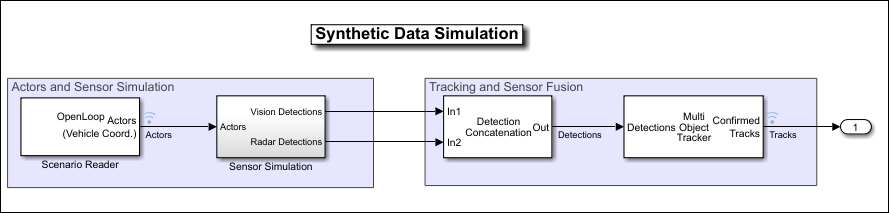
例如,在这个模型中,传感器仿真子系统的输出连接检测雷达检测发电机块到一个单独的块,集群检测。

在这个模型中,传感器仿真子系统输出连接,集群检测驾驶雷达数据生成器块管道直接进入下一部分的模型。