驾驶场景设计gydF4y2Ba
设计驾驶场景,配置传感器,并生成合成目标检测gydF4y2Ba
描述gydF4y2Ba
的gydF4y2Ba驾驶场景设计gydF4y2Ba应用程序使您能够设计合成驾驶场景来测试您的自动驾驶系统。gydF4y2Ba
使用该应用程序,您可以:gydF4y2Ba
使用拖放界面创建道路和角色模型。gydF4y2Ba
配置安装在自我车辆上的视觉和雷达传感器,并使用这些传感器模拟场景中演员和车道边界的检测。gydF4y2Ba
负载驾驶场景代表欧洲新车评估计划(Euro NCAP)gydF4y2Ba®gydF4y2Ba)测试协议gydF4y2Ba[1]gydF4y2Ba[2]gydF4y2Ba[3]gydF4y2Ba以及其他预先构建的场景。gydF4y2Ba
进口OpenDRIVEgydF4y2Ba®gydF4y2Ba道路和车道进入驾驶场景。该应用程序支持O金宝apppenDRIVE格式规范版本1.4HgydF4y2Ba[4]gydF4y2Ba.gydF4y2Ba
从HERE HD Live地图导入道路数据gydF4y2Ba[gydF4y2Ba1gydF4y2Ba]gydF4y2BaWeb服务转换成一个驾驶场景。gydF4y2Ba
导出合成传感器检测到MATLABgydF4y2Ba®gydF4y2Ba.gydF4y2Ba
生成场景和传感器的MATLAB代码,然后通过编程方式修改场景并导入到app中进行进一步的仿真。gydF4y2Ba
生成Simulink金宝appgydF4y2Ba®gydF4y2Ba从场景和传感器中建模,并使用生成的模型来测试传感器融合或车辆控制算法。gydF4y2Ba
要了解该应用程序的更多信息,请参见gydF4y2Ba驾驶场景设计gydF4y2Ba.gydF4y2Ba

打开驾驶场景设计器AppgydF4y2Ba
MATLAB工具条:在gydF4y2Ba应用程序gydF4y2Ba选项卡,在gydF4y2Ba汽车gydF4y2Ba,点击应用程序图标。gydF4y2Ba
MATLAB命令提示符:输入gydF4y2Ba
drivingScenarioDesignergydF4y2Ba.gydF4y2Ba
例子gydF4y2Ba
构建一个驾驶场景gydF4y2Ba
构建车辆在弯曲道路上行驶的驾驶场景,并将道路和车辆模型导出到MATLAB工作空间。有关构建驾驶场景的更详细示例,请参见gydF4y2Ba构建一个驾驶场景并生成合成检测gydF4y2Ba.gydF4y2Ba
打开gydF4y2Ba驾驶场景设计gydF4y2Ba应用程序。gydF4y2Ba
drivingScenarioDesignergydF4y2Ba
创造一条弯曲的道路。在应用程序工具条上,单击gydF4y2Ba增加道路gydF4y2Ba.单击画布底部,将道路路径扩展到画布中间,然后再次单击画布。将道路路径扩展到画布的顶部,然后双击创建道路。要使曲线更复杂,单击并拖动道路中心(开放的圆圈),或双击道路以添加更多的道路中心。gydF4y2Ba

在道路上增加车道。在左边的窗格上gydF4y2Ba道路gydF4y2Ba选项卡,展开gydF4y2Ba车道gydF4y2Ba部分。设置gydF4y2Ba车道数gydF4y2Ba来gydF4y2Ba2gydF4y2Ba.gydF4y2Ba

默认情况下,这条路是单向的,两边都有坚实的车道标记来表示路肩。gydF4y2Ba

在道路的一端增加一辆车。在应用程序工具条上,选择gydF4y2Ba添加演员gydF4y2Ba>gydF4y2Ba车gydF4y2Ba.然后点击道路,设置车辆的初始位置。gydF4y2Ba

设置车辆行驶路径。右键单击汽车,选择gydF4y2Ba添加锚点gydF4y2Ba,并为汽车添加路径点。添加最后一个路径点后,按gydF4y2Ba输入gydF4y2Ba.汽车朝着第一个路径点的方向自动旋转。gydF4y2Ba

调整汽车在路径点之间通过时的速度。在左边的窗格上gydF4y2Ba演员gydF4y2Ba选项卡,在gydF4y2Ba轨迹gydF4y2Ba节,清除gydF4y2Ba恒速gydF4y2Ba复选框。然后,在gydF4y2Ba路点gydF4y2Ba表格,设置速度,gydF4y2Bav(米/秒)gydF4y2Ba,当汽车进入每个路点段时,以m/s为单位计算。为了模拟更真实的情况,在直线路段增加车速,在曲线路段降低车速。例如:gydF4y2Ba

运行该场景,并根据需要调整设置。然后单击gydF4y2Ba保存gydF4y2Ba>gydF4y2Ba道路和演员gydF4y2Ba将道路和汽车模型保存到mat文件。gydF4y2Ba
从场景生成检测gydF4y2Ba
从预先构建的欧洲NCAP测试协议的驾驶场景中生成视觉传感器检测。gydF4y2Ba
有关应用程序提供的预构建场景的详细信息,请参见gydF4y2Ba在驾驶场景设计器中预构建驾驶场景gydF4y2Ba.gydF4y2Ba
有关可用的欧洲NCAP方案的详细信息,请参见gydF4y2Ba驾驶场景设计中的欧洲NCAP驾驶场景gydF4y2Ba.gydF4y2Ba
加载与行人儿童碰撞的欧洲NCAP自动紧急制动(AEB)场景。在碰撞时,撞击点发生在汽车宽度的50%处。gydF4y2Ba
Path = fullfile(matlabroot,gydF4y2Ba“工具箱”gydF4y2Ba,gydF4y2Ba“共享”gydF4y2Ba,gydF4y2Ba“drivingscenario”gydF4y2Ba,gydF4y2Ba...gydF4y2Ba“PrebuiltScenarios”gydF4y2Ba,gydF4y2Ba“EuroNCAP”gydF4y2Ba);目录genpath(路径))gydF4y2Ba将文件夹添加到路径gydF4y2BadrivingScenarioDesigner (gydF4y2Ba“AEB_PedestrianChild_Nearside_50width.mat”gydF4y2Ba) rmpath(路径)gydF4y2Ba从路径中删除文件夹gydF4y2Ba

在自我车辆上增加一个前置雷达传感器。第一次点击gydF4y2Ba添加雷达gydF4y2Ba.然后,在gydF4y2Ba传感器的画布gydF4y2Ba,点击车辆前车窗上预先设定的传感器位置。缺省情况下,雷达为远程雷达。gydF4y2Ba

运行该场景。通过在画布和视图之间切换来检查场景的不同方面。您可以在gydF4y2Ba传感器的画布gydF4y2Ba而且gydF4y2Ba场景帆布gydF4y2Ba在gydF4y2Ba鸟瞰的情节gydF4y2Ba而且gydF4y2Ba自我中心视图gydF4y2Ba.gydF4y2Ba

将传感器数据导出到MATLAB工作空间。点击gydF4y2Ba出口gydF4y2Ba>gydF4y2Ba导出传感器数据gydF4y2Ba,输入工作空间变量名称,单击gydF4y2Ba好吧gydF4y2Ba.gydF4y2Ba
导入程序化驾驶场景和传感器gydF4y2Ba
以编程方式创建一个驾驶场景、雷达传感器和相机传感器,然后将场景和传感器导入到应用程序中。有关使用编程驾驶场景和传感器的详细信息,请参见gydF4y2Ba以编程方式创建驾驶场景变化gydF4y2Ba.gydF4y2Ba
创建一个简单的驾驶场景gydF4y2BadrivingScenariogydF4y2Ba对象。在这个场景中,自我车以每秒30米的恒定速度在50米的路段上直线行驶。对于自我载体,指定agydF4y2BaClassIDgydF4y2Ba的gydF4y2Ba1gydF4y2Ba.这个值对应于应用程序gydF4y2Ba类IDgydF4y2Ba的gydF4y2Ba1gydF4y2Ba,指的是阶级演员gydF4y2Ba车gydF4y2Ba.有关应用程序如何定义类的更多详细信息,请参见gydF4y2Ba类gydF4y2Ba参数说明gydF4y2Ba演员gydF4y2Ba参数选项卡。gydF4y2Ba
scenario = drivingScenario;roadCenters = [0 0 0;50 0 0];路(场景,roadCenters);egoVehicle =车辆(场景,gydF4y2Ba“ClassID”gydF4y2Ba, 1gydF4y2Ba“位置”gydF4y2Ba,[5 0 0]);路点= [5 0 0;45 0 0];速度= 30;轨迹(egoVehicle、锚点、速度);gydF4y2Ba
创建一个雷达传感器使用gydF4y2BaradarDetectionGeneratorgydF4y2Ba对象创建一个相机传感器gydF4y2BavisionDetectionGeneratorgydF4y2Ba对象。将两个传感器放置在车辆原点,雷达朝向前方,摄像头朝向后方。gydF4y2Ba
雷达=雷达探测生成器(gydF4y2Ba“SensorLocation”gydF4y2Ba[0 0]);相机=视觉检测生成器(gydF4y2Ba“SensorLocation”gydF4y2Ba[0 0],gydF4y2Ba“偏航”gydF4y2Ba, -180);gydF4y2Ba
将场景、前置雷达传感器和后置摄像头传感器导入应用程序。gydF4y2Ba
drivingScenarioDesigner(场景中,{雷达、相机})gydF4y2Ba


然后可以运行场景并修改场景和传感器。产生新的gydF4y2BadrivingScenariogydF4y2Ba,gydF4y2BaradarDetectionGeneratorgydF4y2Ba,gydF4y2BavisionDetectionGeneratorgydF4y2Ba对象,在应用程序工具条上,选择gydF4y2Ba出口gydF4y2Ba>gydF4y2Ba导出MATLAB函数gydF4y2Ba,然后运行生成的函数。gydF4y2Ba
生成gydF4y2Ba金宝app场景和传感器模型gydF4y2Ba
加载一个包含传感器的驾驶场景,并从该场景和传感器生成一个Simulink模型。金宝app有关从应用程序生成Simulink模型的更详细示例,请参见金宝appgydF4y2Ba使用驾驶场景设计器生成传感器检测块gydF4y2Ba.gydF4y2Ba
将预构建的驾驶场景加载到应用程序中。该场景包含两辆汽车穿过十字路口。ego车辆向北行驶,并装有一个摄像传感器。该传感器被配置为检测物体和车道。gydF4y2Ba
Path = fullfile(matlabroot,gydF4y2Ba“工具箱”gydF4y2Ba,gydF4y2Ba“共享”gydF4y2Ba,gydF4y2Ba“drivingscenario”gydF4y2Ba,gydF4y2Ba“PrebuiltScenarios”gydF4y2Ba);目录genpath(路径))gydF4y2Ba将文件夹添加到路径gydF4y2BadrivingScenarioDesigner (gydF4y2Ba“EgoVehicleGoesStraight_VehicleFromLeftGoesStraight.mat”gydF4y2Ba) rmpath(路径)gydF4y2Ba从路径中删除文件夹gydF4y2Ba

生成场景和传感器的Si金宝appmulink模型。在应用程序工具条上,选择gydF4y2Ba出口gydF4y2Ba>gydF4y2Ba导出Simul金宝appink模型gydF4y2Ba.如果系统提示保存场景文件。gydF4y2Ba

的gydF4y2Ba场景的读者gydF4y2BaBlock从场景文件中读取道路和参与者。要更新模型中的场景数据,请在应用程序中更新场景并保存文件。gydF4y2Ba
的gydF4y2Ba视觉检测发生器gydF4y2Ba块重新创建应用程序中定义的相机传感器。要更新模型中的传感器,请更新应用程序中的传感器,选择gydF4y2Ba出口gydF4y2Ba>gydF4y2Ba导出传感器Simulink模金宝app型gydF4y2Ba,并将新生成的传感器块复制到模型中。如果在更新传感器时更新了任何道路或角色,则选择gydF4y2Ba出口gydF4y2Ba>gydF4y2Ba导出Simul金宝appink模型gydF4y2Ba.在这种情况下,gydF4y2Ba场景的读者gydF4y2BaBlock准确地读取参与者配置文件数据并将其传递给传感器。gydF4y2Ba
为3D模拟指定车辆轨迹gydF4y2Ba
创建具有车辆轨迹的场景,稍后可以在Simulink中重新创建该场景,以便在3D环境中进行模拟。金宝appgydF4y2Ba
打开一个预构建的场景,该场景可以通过3D环境重新创建一个可用的默认场景。在应用程序工具条上,选择gydF4y2Ba开放gydF4y2Ba>gydF4y2Ba预先构建的场景gydF4y2Ba>gydF4y2BaSimulation3DgydF4y2Ba然后选择一个场景。例如,选择gydF4y2BaDoubleLaneChange.matgydF4y2Ba场景。gydF4y2Ba

指定车辆及其轨迹。gydF4y2Ba

更新车辆的尺寸,以匹配3D模拟环境中预定义车辆类型的尺寸。gydF4y2Ba
在gydF4y2Ba演员gydF4y2Ba选项卡,选择gydF4y2Ba3D显示类型gydF4y2Ba你想要的选项。gydF4y2Ba
在应用程序工具条上,选择gydF4y2Ba3 d显示gydF4y2Ba>gydF4y2Ba使用3D模拟演员尺寸gydF4y2Ba.在gydF4y2Ba场景帆布gydF4y2Ba时,参与者尺寸更新以匹配3D模拟环境中参与者的预定义尺寸。gydF4y2Ba
当您稍后在Simulink中重新创建该场景时,可以预览该场景的外观。金宝app在应用程序工具条上,选择gydF4y2Ba3 d显示gydF4y2Ba>gydF4y2Ba三维显示中的视图仿真gydF4y2Ba.待3D显示窗口打开后,单击gydF4y2Ba运行gydF4y2Ba.gydF4y2Ba

根据需要修改飞行器和轨迹。避免更改场景中预定义的道路网络或角色。否则,应用程序场景将与您稍后在Simulink中重新创建的场景不匹配。金宝app如果更改场景,3D显示窗口将关闭。gydF4y2Ba
修改完场景后,可以在Simulink模型中重新创建场景,以便在3D仿真环境中使用。金宝app有关显示如何设置此类模型的示例,请参见gydF4y2Ba可视化三维模拟传感器覆盖和检测gydF4y2Ba.gydF4y2Ba
相关的例子gydF4y2Ba
参数gydF4y2Ba
道路gydF4y2Ba-道路宽度,银行角度,车道规格,和道路中心位置gydF4y2Ba
选项卡gydF4y2Ba
要启用gydF4y2Ba道路gydF4y2Ba参数,至少添加一条道路到场景中。然后,选择一条路从gydF4y2Ba场景帆布gydF4y2Ba或者是gydF4y2Ba路gydF4y2Ba参数。中的参数值gydF4y2Ba道路gydF4y2Ba标签是基于你选择的道路。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 路gydF4y2Ba | 要修改的道路,指定为场景中的道路列表。gydF4y2Ba |
| 的名字gydF4y2Ba | 道路名称。gydF4y2Ba |
| 宽度(米)gydF4y2Ba | 道路宽度,以米为单位,指定为范围(0,50)内的十进制标量。gydF4y2Ba 如果道路的曲率太大,无法适应指定的道路宽度,应用程序就不会生成道路。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 倾斜角度(度)gydF4y2Ba | 倾斜度:道路的左右倾斜度,以度表示,用下列值之一表示:gydF4y2Ba
当您向道路添加一个actor时,您不必更改actor位置以匹配此参数指定的倾斜角。演员自动沿着道路的倾斜角度前进。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
车道gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 车道数gydF4y2Ba | 道路上的车道数,指定为以下值之一:gydF4y2Ba
方法中指定的宽度为增加的车道数gydF4y2Ba车道宽度(m)gydF4y2Ba参数。如果gydF4y2Ba车道宽度(m)gydF4y2Ba是具有不同车道宽度的向量,则添加的车道的宽度与最后一个向量元素中指定的宽度相同。gydF4y2Ba |
||||||||||||
| 车道宽度(m)gydF4y2Ba | 道路上每条车道的宽度,以米为单位,指定为下列值之一:gydF4y2Ba
每个车道的宽度必须大于它所包含的车道标记的宽度。这些车道标志是由gydF4y2Ba标记>宽度(m)gydF4y2Ba参数。gydF4y2Ba |
||||||||||||
| 车道类型gydF4y2Ba | 道路中的车道,指定为所选道路中的车道类型列表。如果要修改一个或多个车道参数,包括车道类型、颜色和强度,请从下拉列表中选择所需的车道。gydF4y2Ba | ||||||||||||
| 车道类型>类型gydF4y2Ba | 车道类型,指定为以下值之一:gydF4y2Ba
默认的gydF4y2Ba:gydF4y2Ba |
||||||||||||
| 车道类型>颜色gydF4y2Ba | 车道的颜色,指定为RGB三元组,默认值为:gydF4y2Ba
或者,您还可以指定一些常见的颜色为RGB三元组、十六进制颜色代码、颜色名称或短颜色名称。有关更多信息,请参见gydF4y2Ba车道和标记的颜色规范gydF4y2Ba.gydF4y2Ba |
||||||||||||
| 车道类型>强度gydF4y2Ba | 车道颜色的饱和强度,指定为范围[0,1]中的十进制标量。gydF4y2Ba
默认的gydF4y2Ba:gydF4y2Ba |
||||||||||||
| 车道标记gydF4y2Ba | 车道标记,指定为所选道路上的车道标记列表。在下拉列表中选择需要修改的车道标记,可以修改一个或多个车道标记参数,包括标记类型、颜色和强度。gydF4y2Ba 一条有gydF4y2BaNgydF4y2Ba连思有(gydF4y2BaNgydF4y2Ba+ 1)车道标志。gydF4y2Ba |
||||||||||||
| 车道标记>指定一条车道上的多个标记类型gydF4y2Ba | 选择此参数可定义复合车道标记。复合车道标记包括沿车道的多种类型的标记。车道标记中包含每种标记类型的部分称为gydF4y2Ba标记片段gydF4y2Ba.有关复合车道标记的更多信息,请参见gydF4y2Ba复合车道标记gydF4y2Ba.gydF4y2Ba |
||||||||||||
| 车道标志>段数gydF4y2Ba | 复合车道标记中的标记段数,指定为大于或等于2的整数。复合车道标线必须至少有两个标线段。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba 依赖关系gydF4y2Ba 要启用此参数,请选择gydF4y2Ba在一条车道上指定多个标记类型gydF4y2Ba参数。gydF4y2Ba |
||||||||||||
| 车道标志>段范围gydF4y2Ba | 复合车道标记中每个标记段的规范化范围,指定为范围[0,1]中的值的行向量。向量的长度必须等于gydF4y2Ba段数gydF4y2Ba参数值。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba 依赖关系gydF4y2Ba 要启用此参数,请选择gydF4y2Ba在一条车道上指定多个标记类型gydF4y2Ba参数。gydF4y2Ba |
||||||||||||
| 车道标记>标记段gydF4y2Ba | 标记段,指定为所选车道标记中的标记类型列表。在下拉列表中选择需要修改的标记段,可以修改标记段的类型、颜色、强度等参数。gydF4y2Ba 依赖关系gydF4y2Ba 要启用此参数,请选择gydF4y2Ba在一条车道上指定多个标记类型gydF4y2Ba参数。gydF4y2Ba |
||||||||||||
| 车道标志>类型gydF4y2Ba | 车道标记的类型,指定为以下值之一:gydF4y2Ba
默认情况下,对于单行道,最左边的车道标记为实黄色线,最右边的车道标记为实白色线,内车道标记为虚线。对于双向道路,默认的最外侧车道标记都是实线,分隔车道标记是两条实线。gydF4y2Ba 如果您启用gydF4y2Ba在一条车道上指定多个标记类型gydF4y2Ba参数,则此值将应用于复合车道标记中的选定标记段。gydF4y2Ba |
||||||||||||
| 车道标记>颜色gydF4y2Ba | 车道标记的颜色,指定为RGB三元组、十六进制颜色代码、颜色名称或短颜色名称。对于指定双线的车道标记,两条线使用相同的颜色。gydF4y2Ba 您还可以将一些常见颜色指定为RGB三元组、十六进制颜色代码、颜色名称或短颜色名称。有关更多信息,请参见gydF4y2Ba车道和标记的颜色规范gydF4y2Ba.gydF4y2Ba 如果您启用gydF4y2Ba在一条车道上指定多个标记类型gydF4y2Ba参数,则此值将应用于复合车道标记中的选定标记段。gydF4y2Ba |
||||||||||||
| 车道标记>强度gydF4y2Ba | 车道标记颜色的饱和强度,指定为范围[0,1]中的十进制标量。gydF4y2Ba
对于指定双线的车道标记,对两条线使用相同的强度。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba 如果您启用gydF4y2Ba在一条车道上指定多个标记类型gydF4y2Ba参数,则此值将应用于复合车道标记中的选定标记段。gydF4y2Ba |
||||||||||||
| 车道标志>宽度(m)gydF4y2Ba | 车道标记的宽度,以米为单位,指定为正十进制标量。gydF4y2Ba 车道标志的宽度必须小于其包围车道的宽度。的gydF4y2Ba封闭车道gydF4y2Ba是车道正左边的车道标志。gydF4y2Ba 对于指定双线的车道标记,两条线使用相同的宽度。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba 如果您启用gydF4y2Ba在一条车道上指定多个标记类型gydF4y2Ba参数,则此值将应用于复合车道标记中的选定标记段。gydF4y2Ba |
||||||||||||
| 车道标记>长度(m)gydF4y2Ba | 虚线车道标记中的虚线长度,以米为单位,指定为范围(0,50)内的十进制标量。gydF4y2Ba 对于指定双线的车道标记,两条线使用相同的长度。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba 如果您启用gydF4y2Ba在一条车道上指定多个标记类型gydF4y2Ba参数,则此值将应用于复合车道标记中的选定标记段。gydF4y2Ba |
||||||||||||
| 车道标志>间距(m)gydF4y2Ba | 虚线车道标记中虚线之间的间隔长度,以米为单位,指定为范围(0,150)内的十进制标量。gydF4y2Ba 对于指定双线的车道标记,两条线使用相同的空间。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba 如果您启用gydF4y2Ba在一条车道上指定多个标记类型gydF4y2Ba参数,则此值将应用于复合车道标记中的选定标记段。gydF4y2Ba |
道路中心gydF4y2Ba
每一行gydF4y2Ba道路中心gydF4y2Ba表包含gydF4y2BaxgydF4y2Ba-,gydF4y2BaygydF4y2Ba- - - - - -,gydF4y2BazgydF4y2Ba-所选道路中道路中心的位置。所有道路必须至少有两个唯一的道路中心位置。更新表中的单元格时,gydF4y2Ba场景帆布gydF4y2Ba更新以反映新的道路中心位置。道路的方向取决于道路中心的值。道路中心指定道路在中呈现的方向gydF4y2Ba场景帆布gydF4y2Ba.有关更多信息,请参见gydF4y2Ba绘制道路方向及车道编号gydF4y2Ba.gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| x(米)gydF4y2Ba | xgydF4y2Ba-道路中心的轴位置,以米为单位,指定为十进制标量。gydF4y2Ba |
| y(米)gydF4y2Ba | ygydF4y2Ba-道路中心的轴位置,以米为单位,指定为十进制标量。gydF4y2Ba |
| z (m)gydF4y2Ba | zgydF4y2Ba-道路中心的轴位置,以米为单位,指定为十进制标量。gydF4y2Ba
默认的gydF4y2Ba:gydF4y2Ba |
演员gydF4y2Ba-角色位置,方向,RCS模式和轨迹gydF4y2Ba
选项卡gydF4y2Ba
要启用gydF4y2Ba演员gydF4y2Ba参数,至少向场景中添加一个参与者。然后,从gydF4y2Ba场景帆布gydF4y2Ba或者从列表上gydF4y2Ba演员gydF4y2Ba选项卡。中的参数值gydF4y2Ba演员gydF4y2Ba选项卡是基于您所选择的演员。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 颜色gydF4y2Ba | 要更改参与者的颜色,在参与者选择列表旁边,单击该参与者的颜色补丁。gydF4y2Ba
然后,使用颜色选择器选择MATLAB图形中常用的标准颜色之一。控件中选择自定义颜色gydF4y2Ba自定义颜色gydF4y2Ba第一次单击选项卡gydF4y2Ba 默认情况下,应用程序将每个新创建的角色设置为新颜色。的默认颜色顺序为基础gydF4y2Ba 要为特定类的所有新创建的角色设置一个默认颜色,请在应用程序工具条上选择gydF4y2Ba添加演员gydF4y2Ba>gydF4y2Ba编辑角色类gydF4y2Ba.然后,选择gydF4y2Ba设置默认颜色gydF4y2Ba并单击相应的颜色补丁进行颜色设置。若要为类选择默认颜色,请使用gydF4y2Ba场景帆布gydF4y2Ba必须不包含该类的参与者。gydF4y2Ba 在应用程序中所做的颜色更改将被结转到gydF4y2Ba鸟瞰的范围gydF4y2Ba可视化。gydF4y2Ba |
||||||||||||
| 设定为自我载体gydF4y2Ba | 将选中的参与者设置为场景中的自我载体。gydF4y2Ba 当你在你的场景中添加传感器时,应用程序会将它们添加到自我载体中。此外,gydF4y2Ba自我中心视图gydF4y2Ba而且gydF4y2Ba鸟瞰的情节gydF4y2BaWindows从自我车辆的角度显示模拟。gydF4y2Ba 只有拥有车辆等级的演员,比如gydF4y2Ba 有关actor类的详细信息,请参见gydF4y2Ba类gydF4y2Ba参数描述。gydF4y2Ba |
||||||||||||
| 的名字gydF4y2Ba | 演员的名字。gydF4y2Ba |
||||||||||||
| 类gydF4y2Ba | 参与者的类,指定为可以将所选参与者更改到的类列表。gydF4y2Ba 您只能将载体角色的类更改为其他载体类。默认的车辆类别是gydF4y2Ba 车辆和非车辆类别的列表出现在应用程序工具条中gydF4y2Ba添加演员gydF4y2Ba>gydF4y2Ba车辆gydF4y2Ba而且gydF4y2Ba添加演员gydF4y2Ba>gydF4y2Ba其他gydF4y2Ba部分,分别。gydF4y2Ba 在应用程序中创建的角色具有默认的尺寸集、雷达横截面模式以及基于它们的其他属性gydF4y2Ba类IDgydF4y2Ba价值。下表显示了默认值gydF4y2Ba类IDgydF4y2Ba值和角色类。gydF4y2Ba
要修改参与者类或创建新的参与者类,请在应用程序工具条上选择gydF4y2Ba添加演员gydF4y2Ba>gydF4y2Ba编辑角色类gydF4y2Ba或gydF4y2Ba添加演员gydF4y2Ba>gydF4y2Ba新演员类gydF4y2Ba,分别。gydF4y2Ba |
||||||||||||
| 3D显示类型gydF4y2Ba | 在3D显示窗口中显示参与者的显示类型,指定为可以将所选参与者更改为的显示类型列表。gydF4y2Ba 在app工具条上,单击,在三维显示窗口中显示仿真场景gydF4y2Ba3 d显示gydF4y2Ba>gydF4y2Ba三维显示中的视图仿真gydF4y2Ba.该应用程序通过使用虚幻引擎渲染此显示gydF4y2Ba®gydF4y2Ba来自Epic GamesgydF4y2Ba®gydF4y2Ba.gydF4y2Ba 对于任何演员,可用的gydF4y2Ba3D显示类型gydF4y2Ba属性中指定的参与者类gydF4y2Ba类gydF4y2Ba参数。gydF4y2Ba
属性更改参与者的维度gydF4y2Ba演员属性gydF4y2Ba参数,应用程序将这些更改应用于gydF4y2Ba场景帆布gydF4y2Ba但不是在3D显示。本案例不适用于gydF4y2Ba3D显示类型gydF4y2Ba设置为gydF4y2Ba 在3D显示中,所有其他显示类型的角色都具有预定义的尺寸。控件中的参与者若要在两个显示中使用相同的尺寸,可以将预定义的3D显示尺寸应用于gydF4y2Ba场景帆布gydF4y2Ba显示。在应用程序工具条的下面gydF4y2Ba3 d显示gydF4y2Ba中,选择gydF4y2Ba使用3D模拟演员尺寸gydF4y2Ba.gydF4y2Ba |

演员属性gydF4y2Ba
参与者属性包括参与者的位置和方向。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 长度(米)gydF4y2Ba | actor的长度,以米为单位,指定为范围(0,60)内的十进制标量。gydF4y2Ba 对于车辆,长度必须大于(gydF4y2Ba前悬gydF4y2Ba+gydF4y2Ba后方过剩gydF4y2Ba).gydF4y2Ba |
| 宽度(米)gydF4y2Ba | 参与者的宽度,以米为单位,指定为范围(0,20)内的十进制标量。gydF4y2Ba |
| 高度(米)gydF4y2Ba | 参与者的高度,以米为单位,指定为范围(0,20)内的十进制标量。gydF4y2Ba |
| 前悬gydF4y2Ba | 前轴和前保险杠之间的距离,以米为单位,指定为十进制标量。gydF4y2Ba 前悬垂必须小于(gydF4y2Ba长度(米)gydF4y2Ba- - - - - -gydF4y2Ba后方过剩gydF4y2Ba).gydF4y2Ba 此参数仅适用于车辆。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 后方过剩gydF4y2Ba | 后桥和后保险杠之间的距离,以米为单位,指定为十进制标量。gydF4y2Ba 后悬垂必须小于(gydF4y2Ba长度(米)gydF4y2Ba- - - - - -gydF4y2Ba前悬gydF4y2Ba).gydF4y2Ba 此参数仅适用于车辆。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 卷gydF4y2Ba | 物体与物体的夹角gydF4y2BaxgydF4y2Ba-axis,以度为单位,指定为十进制标量。gydF4y2Ba 卷gydF4y2Ba是顺时针正的gydF4y2BaxgydF4y2Ba-轴,它指向参与者前方。gydF4y2Ba 导出驾驶场景的MATLAB函数并运行该函数时,输出场景中角色的滚转角度被包装到范围[-180,180]。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 球场gydF4y2Ba | 物体与物体的夹角gydF4y2BaygydF4y2Ba-axis,以度为单位,指定为十进制标量。gydF4y2Ba 球场gydF4y2Ba是顺时针正的gydF4y2BaygydF4y2Ba-轴,它指向参与者的左侧。gydF4y2Ba 当导出驾驶场景的MATLAB函数并运行该函数时,输出场景中演员的俯仰角被包装为范围[-180,180]。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 偏航gydF4y2Ba | 物体与物体的夹角gydF4y2BazgydF4y2Ba-axis,以度为单位,指定为十进制标量。gydF4y2Ba 偏航gydF4y2Ba是顺时针正的gydF4y2BazgydF4y2Ba-轴,指向地面。然而,gydF4y2Ba场景帆布gydF4y2Ba有一个鸟瞰的视角,看在相反的方向gydF4y2BazgydF4y2Ba设在。因此,当在画布上查看演员时,gydF4y2Ba偏航gydF4y2Bacounterclockwise-positive。gydF4y2Ba 导出驾驶场景的MATLAB函数并运行该函数时,输出场景中角色的偏航角被包装为范围[-180,180]。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
雷达截面gydF4y2Ba
使用这些参数可以手动指定角色的雷达截面(RCS)。或者,要从文件或MATLAB工作区导入RCS,请展开此参数部分并单击gydF4y2Ba进口gydF4y2Ba.gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 方位角(度)gydF4y2Ba | actor的水平反射模式,以度为单位,指定为在[-180,180]范围内单调递增的十进制值的向量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 仰角(度)gydF4y2Ba | actor的垂直反射模式,以度为单位,指定为在[- 90,90]范围内单调递增的十进制值的向量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 模式(dBsm)gydF4y2Ba | RCS模式,单位为分贝/平方米,指定为agydF4y2Ba问gydF4y2Ba——- - - - - -gydF4y2BaPgydF4y2Ba十进制数值表。RCS是方位角和仰角的函数,其中:gydF4y2Ba
|
轨迹gydF4y2Ba
手动设置或修改角色在其指定的路径点上的位置和速度。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 航路点的等候时间gydF4y2Ba | 选择此参数可启用在沿轨迹选定的路径点上暂停参与者。gydF4y2Ba 如果选择此参数,请使用gydF4y2Ba路点gydF4y2Ba表指定参与者在一个或多个选定路径点上的等待时间。当您将等待时间设置为正值时,相应的速度值gydF4y2Bav(米/秒)gydF4y2Ba重置,gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 恒速(m/s)gydF4y2Ba | 选择此参数为参与者通过其所有路径点设置恒定的速度。将这个恒定速度指定为正十进制标量,单位为米每秒。gydF4y2Ba 如果清除此参数,请使用gydF4y2Ba路点gydF4y2Ba表指定参与者在每个路径点上的速度。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 路点gydF4y2Ba | 作为表指定的参与者路径点。gydF4y2Ba 每一行对应于一个路径点,并包含在该路径点的位置和速度信息。表列为:gydF4y2Ba
|
传感器(相机)gydF4y2Ba-摄像头传感器位置、摄像头固有参数、检测参数gydF4y2Ba
选项卡gydF4y2Ba
若要访问这些参数,请按照以下步骤向场景中添加至少一个摄像机传感器:gydF4y2Ba
在应用程序工具条上,单击gydF4y2Ba添加相机gydF4y2Ba.gydF4y2Ba
从gydF4y2Ba传感器gydF4y2Ba选项卡,从列表中选择传感器。此选项卡中的参数值基于所选择的传感器。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 启用gydF4y2Ba | 启用或禁用所选传感器。选择此参数可在模拟过程中捕获传感器数据,并在gydF4y2Ba鸟瞰的情节gydF4y2Ba窗格。gydF4y2Ba |
| 的名字gydF4y2Ba | 传感器名称。gydF4y2Ba |
| 更新周期(毫秒)gydF4y2Ba | 传感器更新的频率(以毫秒为单位)指定为下面定义的应用程序采样时间的整数倍gydF4y2Ba设置gydF4y2Ba,在gydF4y2Ba采样时间(毫秒)gydF4y2Ba参数。gydF4y2Ba 默认的gydF4y2Ba更新周期(毫秒)gydF4y2Ba的价值gydF4y2Ba 如果您更新应用程序采样时间,使传感器不再是应用程序采样时间的倍数,应用程序会提示您选择自动更新gydF4y2Ba更新周期(毫秒)gydF4y2Ba参数设置为最接近的整数倍数。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 类型gydF4y2Ba | 传感器类型,指定为任意一种gydF4y2Ba雷达gydF4y2Ba雷达传感器或gydF4y2Ba愿景gydF4y2Ba用于相机传感器。gydF4y2Ba |
传感器的位置gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| X(米)gydF4y2Ba | XgydF4y2Ba传感器在车辆坐标系中的-轴位置,以米为单位,指定为十进制标量。gydF4y2Ba 的gydF4y2BaXgydF4y2Ba-轴指向车辆前方。原点位于车辆后轴的中心。gydF4y2Ba |
| Y(米)gydF4y2Ba | YgydF4y2Ba传感器在车辆坐标系中的-轴位置,以米为单位,指定为十进制标量。gydF4y2Ba 的gydF4y2BaYgydF4y2Ba-轴指向车辆左侧。原点位于车辆后轴的中心。gydF4y2Ba |
| 高度(米)gydF4y2Ba | 传感器离地面的高度,以米为单位,指定为正十进制标量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 卷gydF4y2Ba | 传感器关于其方向的角度gydF4y2BaXgydF4y2Ba-axis,以度为单位,指定为十进制标量。gydF4y2Ba 卷gydF4y2Ba是顺时针正的gydF4y2BaXgydF4y2Ba-轴,它指向传感器前方。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 球场gydF4y2Ba | 传感器关于其方向的角度gydF4y2BaYgydF4y2Ba-axis,以度为单位,指定为十进制标量。gydF4y2Ba 球场gydF4y2Ba是顺时针正的gydF4y2BaYgydF4y2Ba-轴,它指向传感器的左侧。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 偏航gydF4y2Ba | 传感器关于其方向的角度gydF4y2BaZgydF4y2Ba-axis,以度为单位,指定为十进制标量。gydF4y2Ba 偏航gydF4y2Ba是顺时针正的gydF4y2BaZgydF4y2Ba-轴,指向地面。然而,gydF4y2Ba传感器的画布gydF4y2Ba有一个鸟瞰的视角,看在相反的方向gydF4y2BaZgydF4y2Ba设在。因此,当查看此画布上的传感器覆盖区域时,gydF4y2Ba偏航gydF4y2Bacounterclockwise-positive。gydF4y2Ba |
相机的设置gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 焦距XgydF4y2Ba | 相机处于对焦的水平点,以像素为单位,指定为正的十进制标量。gydF4y2Ba 默认焦距的变化取决于你在自我车辆上放置传感器的位置。gydF4y2Ba |
| 焦距YgydF4y2Ba | 摄像机对焦的垂直点(以像素为单位),指定为正的十进制标量。gydF4y2Ba 默认焦距的变化取决于你在自我车辆上放置传感器的位置。gydF4y2Ba |
| 图像的宽度gydF4y2Ba | 水平相机分辨率(以像素为单位),指定为正整数。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 图像的高度gydF4y2Ba | 垂直相机分辨率(以像素为单位)指定为正整数。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 要点XgydF4y2Ba | 水平图像中心(以像素为单位),指定为正十进制标量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| Y主点gydF4y2Ba | 垂直图像中心(以像素为单位),指定为正十进制标量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
检测参数gydF4y2Ba
若要查看应用程序中的所有相机检测参数,请展开gydF4y2Ba传感器的限制gydF4y2Ba,gydF4y2Ba车道的设置gydF4y2Ba,gydF4y2Ba精度和噪音设置gydF4y2Ba部分。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 检测类型gydF4y2Ba | 摄像头报告的检测类型,指定为以下值之一:gydF4y2Ba
默认的gydF4y2Ba:gydF4y2Ba |
| 探测概率gydF4y2Ba | 摄像机检测到物体的概率,指定为范围(0,1]中的十进制标量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 每张图像的假阳性gydF4y2Ba | 每个更新间隔报告的假阳性数,指定为非负的十进制标量。方法中指定的最大检测数必须小于或等于gydF4y2Ba限制检测次数gydF4y2Ba参数。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 限制检测次数gydF4y2Ba | 选择此参数可限制传感器报告的同时对象检测的数量。指定gydF4y2Ba限制检测次数gydF4y2Ba是小于2的正整数gydF4y2Ba63gydF4y2Ba.gydF4y2Ba 若要启用此参数,请设置gydF4y2Ba检测类型gydF4y2Ba参数gydF4y2Ba 默认的gydF4y2Ba:从gydF4y2Ba |
| 检测坐标gydF4y2Ba | 输出检测位置的坐标系统,指定为以下值之一:gydF4y2Ba
默认的gydF4y2Ba:gydF4y2Ba |
传感器的限制gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 最大速度(m/s)gydF4y2Ba | 相机能探测到物体的最快相对速度,以米每秒为单位,指定为非负十进制标量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 最大范围(m)gydF4y2Ba | 摄像机可以探测到物体的最远距离,以米为单位,指定为正十进制标量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 最大允许遮挡gydF4y2Ba | 在仍然被检测到的情况下,可以被阻塞的对象的最大百分比,指定为范围[0,1)内的十进制标量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 最小物体图像宽度gydF4y2Ba | 相机可以检测到的物体的最小水平大小,以像素为单位,指定为正十进制标量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 最小物体图像高度gydF4y2Ba | 相机可以检测到的物体的最小垂直尺寸,以像素为单位,指定为正十进制标量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
车道的设置gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 车道更新间隔(ms)gydF4y2Ba | 传感器更新车道检测的频率,以毫秒为单位,指定为十进制标量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 最小车道图像宽度gydF4y2Ba | 传感器可以检测到的对象的最小水平大小,以像素为单位,指定为十进制标量。gydF4y2Ba 若要启用此参数,请设置gydF4y2Ba检测类型gydF4y2Ba参数gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 最小巷图像高度gydF4y2Ba | 传感器可以检测到的对象的最小垂直尺寸,以像素为单位,指定为十进制标量。gydF4y2Ba 若要启用此参数,请设置gydF4y2Ba检测类型gydF4y2Ba参数gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 边界的准确性gydF4y2Ba | 传感器放置车道边界的精度,以像素为单位,指定为十进制标量。gydF4y2Ba 若要启用此参数,请设置gydF4y2Ba检测类型gydF4y2Ba参数gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 车道数量限制gydF4y2Ba | 选择此参数可限制传感器报告的车道检测数量。指定gydF4y2Ba车道数量限制gydF4y2Ba作为正整数。gydF4y2Ba 若要启用此参数,请设置gydF4y2Ba检测类型gydF4y2Ba参数gydF4y2Ba 默认的gydF4y2Ba:从gydF4y2Ba |
精度和噪音设置gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 包围框精度gydF4y2Ba | 用于将包围框拟合到目标的位置噪声,以像素为单位,指定为正十进制标量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 过程噪声强度(m/s^2)gydF4y2Ba | 用于平滑位置和速度测量的噪声强度,单位为米每秒平方,指定为正的十进制标量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 有噪音gydF4y2Ba | 选择此参数可向传感器测量值添加噪声。gydF4y2Ba 默认的gydF4y2Ba:从gydF4y2Ba |
传感器(雷达)gydF4y2Ba-雷达传感器布置和探测参数gydF4y2Ba
选项卡gydF4y2Ba
若要访问这些参数,请至少向场景中添加一个雷达传感器。gydF4y2Ba
在应用程序工具条上,单击gydF4y2Ba添加雷达gydF4y2Ba.gydF4y2Ba
在gydF4y2Ba传感器gydF4y2Ba选项卡,从列表中选择传感器。参数值根据所选传感器的不同而不同。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 启用gydF4y2Ba | 启用或禁用所选传感器。选择此参数可在模拟过程中捕获传感器数据,并在gydF4y2Ba鸟瞰的情节gydF4y2Ba窗格。gydF4y2Ba |
| 的名字gydF4y2Ba | 传感器名称。gydF4y2Ba |
| 更新周期(毫秒)gydF4y2Ba | 传感器更新的频率(以毫秒为单位)指定为下面定义的应用程序采样时间的整数倍gydF4y2Ba设置gydF4y2Ba,在gydF4y2Ba采样时间(毫秒)gydF4y2Ba参数。gydF4y2Ba 默认的gydF4y2Ba更新周期(毫秒)gydF4y2Ba的价值gydF4y2Ba 如果您更新应用程序采样时间,使传感器不再是应用程序采样时间的倍数,应用程序会提示您选择自动更新gydF4y2Ba更新周期(毫秒)gydF4y2Ba参数设置为最接近的整数倍数。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 类型gydF4y2Ba | 传感器类型,指定为任意一种gydF4y2Ba雷达gydF4y2Ba雷达传感器或gydF4y2Ba愿景gydF4y2Ba用于相机传感器。gydF4y2Ba |
传感器的位置gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| X(米)gydF4y2Ba | XgydF4y2Ba传感器在车辆坐标系中的-轴位置,以米为单位,指定为十进制标量。gydF4y2Ba 的gydF4y2BaXgydF4y2Ba-轴指向车辆前方。原点位于车辆后轴的中心。gydF4y2Ba |
| Y(米)gydF4y2Ba | YgydF4y2Ba传感器在车辆坐标系中的-轴位置,以米为单位,指定为十进制标量。gydF4y2Ba 的gydF4y2BaYgydF4y2Ba-轴指向车辆左侧。原点位于车辆后轴的中心。gydF4y2Ba |
| 高度(米)gydF4y2Ba | 传感器离地面的高度,以米为单位,指定为正十进制标量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 卷gydF4y2Ba | 传感器关于其方向的角度gydF4y2BaXgydF4y2Ba-axis,以度为单位,指定为十进制标量。gydF4y2Ba 卷gydF4y2Ba是顺时针正的gydF4y2BaXgydF4y2Ba-轴,它指向传感器前方。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 球场gydF4y2Ba | 传感器关于其方向的角度gydF4y2BaYgydF4y2Ba-axis,以度为单位,指定为十进制标量。gydF4y2Ba 球场gydF4y2Ba是顺时针正的gydF4y2BaYgydF4y2Ba-轴,它指向传感器的左侧。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 偏航gydF4y2Ba | 传感器关于其方向的角度gydF4y2BaZgydF4y2Ba-axis,以度为单位,指定为十进制标量。gydF4y2Ba 偏航gydF4y2Ba是顺时针正的gydF4y2BaZgydF4y2Ba-轴,指向地面。然而,gydF4y2Ba传感器的画布gydF4y2Ba有一个鸟瞰的视角,看在相反的方向gydF4y2BaZgydF4y2Ba设在。因此,当查看此画布上的传感器覆盖区域时,gydF4y2Ba偏航gydF4y2Bacounterclockwise-positive。gydF4y2Ba |
检测参数gydF4y2Ba
若要查看应用程序中的所有雷达探测参数,请展开gydF4y2Ba先进的参数gydF4y2Ba而且gydF4y2Ba精度和噪音设置gydF4y2Ba部分。gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 探测概率gydF4y2Ba | 雷达探测到物体的概率,指定为范围(0,1]中的十进制标量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 误报率gydF4y2Ba | 每分辨率的错误检测概率,指定为范围[的十进制标量]gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 视场方位gydF4y2Ba | 雷达的水平视场,以度为单位,指定为正的十进制标量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 视野仰角gydF4y2Ba | 雷达的垂直视场,以度为单位,指定为正的十进制标量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 最大范围(m)gydF4y2Ba | 雷达能探测到物体的最远距离,以米为单位,指定为正十进制标量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 距离速率最小,距离速率最大gydF4y2Ba | 选择此参数可设置雷达的最小和最大距离速率限制。指定gydF4y2Ba距离速率gydF4y2Ba而且gydF4y2Ba最大射程gydF4y2Ba十进制标量,单位为米/秒,其中gydF4y2Ba距离速率gydF4y2Ba小于gydF4y2Ba最大射程gydF4y2Ba.gydF4y2Ba 默认(最低)gydF4y2Ba:gydF4y2Ba 默认(最大)gydF4y2Ba:gydF4y2Ba |
| 有高度gydF4y2Ba | 选择此参数,雷达可以测量物体的仰角。中的高程参数gydF4y2Ba精度和噪音设置gydF4y2Ba部分。gydF4y2Ba 默认的gydF4y2Ba:从gydF4y2Ba |
| 有遮挡gydF4y2Ba | 选择此参数使雷达能够模拟遮挡。gydF4y2Ba 默认的gydF4y2Ba:在gydF4y2Ba |
先进的参数gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 参考范围gydF4y2Ba | 给定探测概率的参考范围,以米为单位,指定为正的十进制标量。gydF4y2Ba 的gydF4y2Ba参考范围gydF4y2Ba雷达探测到的目标尺寸是否为gydF4y2Ba参考RCSgydF4y2Ba,给出所指定的检测概率gydF4y2Ba探测概率gydF4y2Ba.gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 参考RCSgydF4y2Ba | 给定探测概率的参考RCS,单位为分贝/平方米,指定为非负十进制标量。gydF4y2Ba 的gydF4y2Ba参考RCSgydF4y2Ba雷达探测到目标的目标尺寸是否在给定的参考范围内gydF4y2Ba参考范围gydF4y2Ba被发现的概率由gydF4y2Ba探测概率gydF4y2Ba.gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 限制检测次数gydF4y2Ba | 选择此参数可限制传感器报告的同时检测数量。指定gydF4y2Ba限制检测次数gydF4y2Ba是小于2的正整数gydF4y2Ba63gydF4y2Ba.gydF4y2Ba 默认的gydF4y2Ba:从gydF4y2Ba |
| 检测坐标gydF4y2Ba | 输出检测位置的坐标系统,指定为以下值之一:gydF4y2Ba
默认的gydF4y2Ba:gydF4y2Ba |
精度和噪音设置gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 方位分辨率gydF4y2Ba | 雷达能够区分两个目标的最小方位角距离,以度为单位,指定为正的十进制标量。gydF4y2Ba 方位角分辨率通常是雷达方位角波束宽度中的3db下点。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 方位偏差分数gydF4y2Ba | 雷达的最大方位精度,指定为非负十进制标量。gydF4y2Ba 方法指定的方位角分辨率的一个分数表示方位角偏差gydF4y2Ba方位分辨率gydF4y2Ba参数。单位是无量纲的。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 海拔决议gydF4y2Ba | 雷达能区分两个目标的最小仰角距离,以度为单位,指定为正的十进制标量。gydF4y2Ba 仰角分辨率通常为雷达仰角波束宽度中的3db下点。gydF4y2Ba 若要启用此参数,请在gydF4y2Ba检测参数gydF4y2Ba部分,选择gydF4y2Ba有高度gydF4y2Ba参数。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 仰角偏置分数gydF4y2Ba | 雷达的最大仰角精度,用非负十进制标量表示。gydF4y2Ba 标高偏置表示为标高分辨率的一个分数gydF4y2Ba海拔决议gydF4y2Ba参数。单位是无量纲的。gydF4y2Ba 要启用此参数,请单击gydF4y2Ba检测参数gydF4y2Ba,选择gydF4y2Ba有高度gydF4y2Ba参数。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 距离分辨率gydF4y2Ba | 雷达能区分两个目标的最小距离,以米为单位,指定为正的十进制标量。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 距离偏差分数gydF4y2Ba | 雷达的最大距离精度,指定为非负十进制标量。gydF4y2Ba 方法中指定的距离分辨率的一个分数表示距离偏差gydF4y2Ba距离分辨率gydF4y2Ba参数。单位是无量纲的。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 距离速率分辨率gydF4y2Ba | 雷达能区分两个目标的最小距离率间隔,以米每秒为单位,指定为正十进制标量。gydF4y2Ba 若要启用此参数,请在gydF4y2Ba检测参数gydF4y2Ba部分,选择gydF4y2Ba距离速率最小,距离速率最大gydF4y2Ba参数并设置范围速率值。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 距离率偏置分数gydF4y2Ba | 雷达的最大距离率精度,指定为非负的十进制标量。gydF4y2Ba 中指定的距离率分辨率的一个分数表示距离率偏差gydF4y2Ba距离速率分辨率gydF4y2Ba参数。单位是无量纲的。gydF4y2Ba 要启用此参数,请gydF4y2Ba检测参数gydF4y2Ba部分,选择gydF4y2Ba距离速率最小,距离速率最大gydF4y2Ba参数并设置范围速率值。gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 有噪音gydF4y2Ba | 选择此参数可向传感器测量值添加噪声。gydF4y2Ba 默认的gydF4y2Ba:从gydF4y2Ba |
| 有虚假警报gydF4y2Ba | 启用传感器检测虚警功能。gydF4y2Ba 默认的gydF4y2Ba:从gydF4y2Ba |
设置gydF4y2Ba-模拟采样时间、停止条件、停止时间gydF4y2Ba
对话框gydF4y2Ba
要访问这些参数,请在应用程序工具条上单击gydF4y2Ba设置gydF4y2Ba.gydF4y2Ba
仿真设置gydF4y2Ba
| 参数gydF4y2Ba | 描述gydF4y2Ba |
|---|---|
| 采样时间(毫秒)gydF4y2Ba | 模拟更新的频率,以毫秒为单位。gydF4y2Ba 增加采样时间,加快模拟速度。这种增加对参与者的速度没有影响,即使参与者在模拟过程中表现得更快。演员的位置只是被采样,并以较低的频率间隔显示在应用程序上,从而产生更快、更混乱的动画。减少采样时间会产生更流畅的动画,但演员的移动速度似乎更慢,模拟需要更长的时间。gydF4y2Ba 采样时间与实际时间无关。例如,如果应用程序每0.1秒采样一次(gydF4y2Ba采样时间(毫秒)gydF4y2Ba=gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 停止条件gydF4y2Ba | 模拟的停止条件,指定为以下值之一:gydF4y2Ba
默认的gydF4y2Ba:gydF4y2Ba |
| 停止时间(秒)gydF4y2Ba | 模拟的停止时间,以秒为单位,指定为正十进制标量。gydF4y2Ba 若要启用此参数,请设置gydF4y2Ba停止条件gydF4y2Ba参数gydF4y2Ba 默认的gydF4y2Ba:gydF4y2Ba |
| 使用RNG种子gydF4y2Ba | 选择此参数可使用随机数生成器(RNG)种子为每个模拟重现相同的结果。将RNG种子指定为小于2的非负整数gydF4y2Ba32gydF4y2Ba.gydF4y2Ba 默认的gydF4y2Ba:从gydF4y2Ba |
编程使用gydF4y2Ba
限制gydF4y2Ba
这里高清实时地图-导入限制gydF4y2Ba
导入HERE HDLM数据时,不支持以下道路和车道特征:金宝appgydF4y2Ba
具有不同宽度的车道——在生成的道路网络中,每个车道都设置为沿其整个长度发现的最大宽度。考虑一个HERE HDLM车道,其宽度沿其长度从2米到4米不等。在生成的道路网络中,车道宽度沿其整个长度为4米。gydF4y2Ba
沿着长度有不同数量车道的道路——在生成的道路网络中,每条道路在其整个长度上都设置有最大数量的车道。考虑这里的HDLM道路,一半是3车道,另一半是2车道。在生成的道路网络中,道路沿其整个长度有3个车道。gydF4y2Ba
沿着一条车道的多个车道标记样式——在生成的路网中,每个车道都被设置为沿道路宽度最大的车道段的标记样式。考虑一个有2个车道段的HERE HDLM车道。第一个车道段宽2米,有坚实的标记。第二个车道段宽4米,并有虚线标记。在生成的道路网络中,车道有一个固定的宽度为4米,并沿着其整个长度的虚线标记。gydF4y2Ba
对道路网络的这些修改有时会导致道路在驾驶场景中重叠。考虑表中以蓝色突出显示的分隔高速公路的HERE HDLM道路。导入驾驶场景中,由于特性不金宝app支持,导致道路车道宽度增大。这一限制导致道路重叠并呈现为一条道路。探测车道的传感器无法探测被覆盖的车道。gydF4y2Ba
| 这里是HDLM道路网络gydF4y2Ba | 导入驾驶场景gydF4y2Ba |
|---|---|
|
|
|


除了不支持的特性外,应用程序中使用的基图可金宝app能与HERE HDLM服务中使用的基图略有不同。导入道路的一些问题也可能是由于HERE HDLM服务中缺少或不准确的地图数据。要检查地图数据中的问题来源,请使用HERE HD Live地图查看器查看HERE HDLM道路网络的几何形状。此查看器需要有效的HERE许可证。有关详细信息,请参见gydF4y2Ba这里的技术gydF4y2Ba的网站。gydF4y2Ba
这里高清实时地图-路线选择限制gydF4y2Ba
当选择HERE高清实时地图道路从感兴趣的区域导入时,该区域的最大允许大小为20平方公里。如果你指定的行驶路线大于20平方公里,应用程序会绘制一个经过优化的区域,以尽可能多地将路线的起点显示在显示中。该图显示了在超过此最大尺寸的路由起点周围绘制的区域的示例。gydF4y2Ba

opdrive导入限制gydF4y2Ba
您只能导入车道、车道类型信息和道路。不支持道路物体和交通信号的导入。金宝appgydF4y2Ba
包含大型道路网络的OpenDRIVE文件可能需要几分钟才能加载。此外,这些道路网络会导致应用程序画布上的交互速度变慢。大型道路网络的例子包括城市道路模型或数千米长的道路。gydF4y2Ba
不支持可变宽度的车道。金宝app宽度设置为该车道内的最高宽度。例如,如果一条车道的宽度从2米到4米不等,应用程序将整个车道的宽度设置为4米。gydF4y2Ba
车道类型信息指定为的道路gydF4y2Ba
开车gydF4y2Ba,gydF4y2Ba边境gydF4y2Ba,gydF4y2Ba限制gydF4y2Ba,gydF4y2Ba肩膀gydF4y2Ba,gydF4y2Ba停车gydF4y2Ba都受支持金宝app。具有任何其他车道类型信息的车道被导入为边界车道。gydF4y2Ba具有多个车道标记样式的道路,指定为gydF4y2Ba
“无名”gydF4y2Ba,gydF4y2Ba“固体”gydF4y2Ba,gydF4y2Ba“DoubleSolid”gydF4y2Ba,gydF4y2Ba“冲”gydF4y2Ba,gydF4y2Ba“DoubleDashed”gydF4y2Ba,gydF4y2Ba“SolidDashed”gydF4y2Ba,gydF4y2Ba“DashedSolid”gydF4y2Ba都受支持金宝app。gydF4y2Ba车道标记样式gydF4y2Ba
马胃蝇蛆点gydF4y2Ba,gydF4y2Ba限制gydF4y2Ba,gydF4y2Ba草gydF4y2Ba不支持。金宝app具有这些标记样式的车道被导入为未标记车道。gydF4y2Ba
欧洲NCAP限制gydF4y2Ba
不支持SAS (speed assistance system)场景。金宝app这些场景需要从交通标志中检测限速,而应用程序不支持。金宝appgydF4y2Ba
3D显示限制gydF4y2Ba
这些限制描述了gydF4y2Ba3 d显示gydF4y2Ba控件上显示的长方体可视化与之不同gydF4y2Ba场景帆布gydF4y2Ba.gydF4y2Ba
道路不会在十字路口形成没有标记的车道。道路和车道标志重叠。gydF4y2Ba
并不是支持所有的actor或车道标记颜色。金宝app3D显示器将所选颜色与它可以呈现的最接近的可用颜色进行匹配。gydF4y2Ba
不支持非驾驶车道的车道类型颜色。金宝app如果选择非行车车道类型,在3D显示中,该车道显示为行车车道。gydF4y2Ba
在gydF4y2Ba演员gydF4y2Ba选项卡中,指定gydF4y2Ba卷gydF4y2Ba而且gydF4y2Ba球场gydF4y2Ba参与者的参数值将被忽略。在gydF4y2Ba路点gydF4y2Ba表格gydF4y2Baz (m)gydF4y2Ba值(即高度值)也会被忽略。在模拟过程中,演员遵循路面的仰角和倾斜角度。gydF4y2Ba
不支持沿车道的多种标记样式。金宝app3D显示器沿车道的整个长度应用第一个车道段的第一个车道标记样式。gydF4y2Ba
演员gydF4y2Ba3D显示类型gydF4y2Ba的gydF4y2Ba
长方体gydF4y2Ba不要在3D显示中移动。在模拟过程中,这些角色在初始指定位置保持静止。gydF4y2Ba
更多关于gydF4y2Ba
演员和车辆gydF4y2Ba
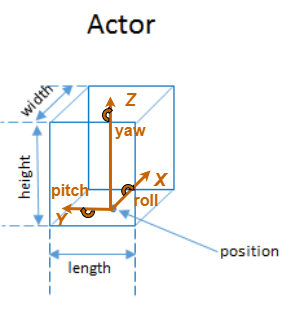
在驾驶场景中,angydF4y2Ba演员gydF4y2Ba是具有特定长度、宽度和高度的长方体(盒形)对象。actor还具有在dBsm中指定的雷达横截面(RCS)模式,您可以通过设置角方位角和仰角坐标来细化该模式。actor的位置定义为其底面的中心。这个中心点被用作行动者的旋转中心,它与地面的接触点,以及它在局部坐标系中的原点。在这个坐标系中:gydF4y2Ba
的gydF4y2BaXgydF4y2Ba-轴指向参与者前方。gydF4y2Ba
的gydF4y2BaYgydF4y2Ba-从actor左侧的轴点。gydF4y2Ba
的gydF4y2BaZgydF4y2Ba-轴指向地面。gydF4y2Ba
滚动,俯仰,和偏航是顺时针正时,看向前的方向gydF4y2BaXgydF4y2Ba-,gydF4y2BaYgydF4y2Ba- - - - - -,gydF4y2BaZgydF4y2Ba分别相互重合。gydF4y2Ba
一个gydF4y2Ba车辆gydF4y2Ba是靠轮子移动的演员。车辆有三个额外的属性来控制它们的前轴和后轴的位置。gydF4y2Ba
轴距gydF4y2Ba-前后轴之间的距离gydF4y2Ba
前悬gydF4y2Ba-车辆前部与前轴之间的距离gydF4y2Ba
后方过剩gydF4y2Ba-后桥与车辆后部之间的距离gydF4y2Ba
与其他类型的演员不同,车辆的位置是由地面上低于后轴中心的点来确定的。这个点对应于飞行器的自然旋转中心。与非车辆参与者一样,该点是车辆局部坐标系中的原点,其中:gydF4y2Ba
的gydF4y2BaXgydF4y2Ba-轴指向车辆前方。gydF4y2Ba
的gydF4y2BaYgydF4y2Ba-轴点从车辆左侧。gydF4y2Ba
的gydF4y2BaZgydF4y2Ba-轴指向地面。gydF4y2Ba
滚动,俯仰,和偏航是顺时针正时,看向前的方向gydF4y2BaXgydF4y2Ba-,gydF4y2BaYgydF4y2Ba- - - - - -,gydF4y2BaZgydF4y2Ba分别相互重合。gydF4y2Ba

长方体车辆的原点(即位置)与三维仿真环境中车辆的原点不同。在三维仿真环境中,车辆的原点在地面上,在车辆的几何中心。gydF4y2Ba
| 长方体车辆原点gydF4y2Ba | 三维仿真车辆原点gydF4y2Ba |
|---|---|
|
|
|


对于非载具actor,原点相同且位于actor几何中心的底部。gydF4y2Ba
在Si金宝appmulink中,要将车辆从长方体原点转换为3D模拟原点,请使用gydF4y2Ba长方体到三维仿真gydF4y2Ba块。有关3D模拟坐标的详细信息,请参见gydF4y2Ba自动驾驶工具箱中三维仿真的坐标系gydF4y2Ba.gydF4y2Ba
车道和标记的颜色规范gydF4y2Ba
此表列出了已命名的颜色选项、等效的RGB三元组,以及可用于指定道路中车道和标记的颜色的十六进制颜色代码。gydF4y2Ba
| 颜色名称gydF4y2Ba | 短名称gydF4y2Ba | RGB值gydF4y2Ba | 十六进制颜色代码gydF4y2Ba | 外观gydF4y2Ba |
|---|---|---|---|---|
红色的gydF4y2Ba |
rgydF4y2Ba |
[10 0 0]gydF4y2Ba |
# FF0000gydF4y2Ba |
|
绿色gydF4y2Ba |
ggydF4y2Ba |
[0 10 0]gydF4y2Ba |
# 00 ff00gydF4y2Ba |
|
蓝色的gydF4y2Ba |
bgydF4y2Ba |
[0 0 1]gydF4y2Ba |
# 0000 ffgydF4y2Ba |
|
青色gydF4y2Ba |
cgydF4y2Ba |
[0 1 1]gydF4y2Ba |
# 00飞行符gydF4y2Ba |
|
品红色的gydF4y2Ba |
米gydF4y2Ba |
[10 0 1]gydF4y2Ba |
#就gydF4y2Ba |
|
黄色的gydF4y2Ba |
ygydF4y2Ba |
[0.98 0.86 0.36]gydF4y2Ba |
# FADB5CgydF4y2Ba |
|
黑色的gydF4y2Ba |
kgydF4y2Ba |
[0 0 0]gydF4y2Ba |
# 000000gydF4y2Ba |
|
白色gydF4y2Ba |
wgydF4y2Ba |
[1 1 1]gydF4y2Ba |
# FFFFFFgydF4y2Ba |
|
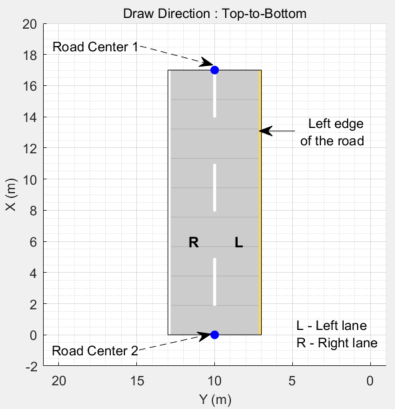
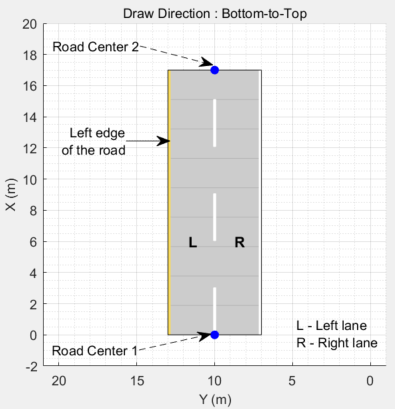
绘制道路方向及车道编号gydF4y2Ba
创建一个道路使用gydF4y2Ba路gydF4y2Ba函数,指定道路中心作为矩阵输入。该函数创建了一条穿过道路中心的有向线,从矩阵第一行的坐标开始,到矩阵最后一行的坐标结束。矩阵的前两行的坐标指定gydF4y2Ba画的方向gydF4y2Ba在路上。这些坐标对应于前两个连续的道路中心。绘制方向是场景图中道路渲染的方向。gydF4y2Ba
创建一个道路使用gydF4y2Ba驾驶场景设计gydF4y2Ba应用程序,您可以指定gydF4y2Ba道路中心gydF4y2Ba参数或交互地绘制gydF4y2Ba场景帆布gydF4y2Ba.有关详细示例,请参见gydF4y2Ba构建一个驾驶场景gydF4y2Ba.在这种情况下,绘制方向是道路渲染的方向gydF4y2Ba场景帆布gydF4y2Ba.gydF4y2Ba
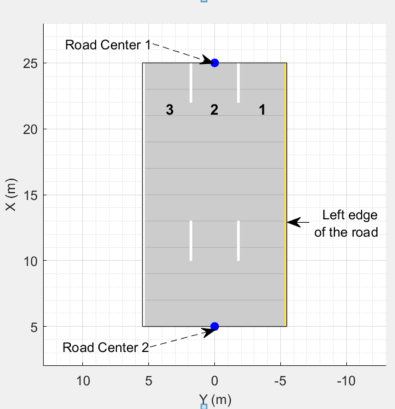
对于一条从上到下绘制方向的道路,两者之间的差异gydF4y2BaxgydF4y2Ba-前两个连续道路中心的坐标为正。gydF4y2Ba
对于从下到上绘制方向的道路,两者之间的差异gydF4y2BaxgydF4y2Ba-前两个连续道路中心的坐标为负。gydF4y2Ba
|
|
|
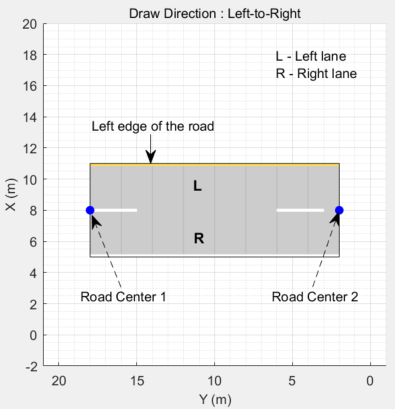
对于从左到右绘制方向的道路,两者之间的差异gydF4y2BaygydF4y2Ba-前两个连续道路中心的坐标为正。gydF4y2Ba
对于从右向左绘制方向的道路,两者之间的差异gydF4y2BaygydF4y2Ba-前两个连续道路中心的坐标为负。gydF4y2Ba
|
|
|
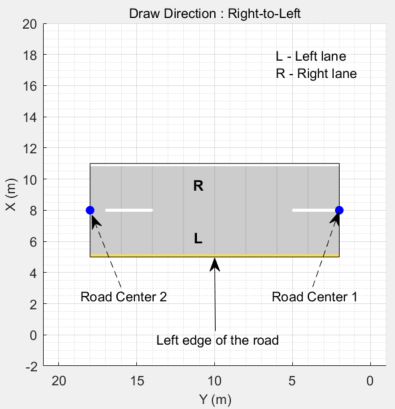
编号车道gydF4y2Ba
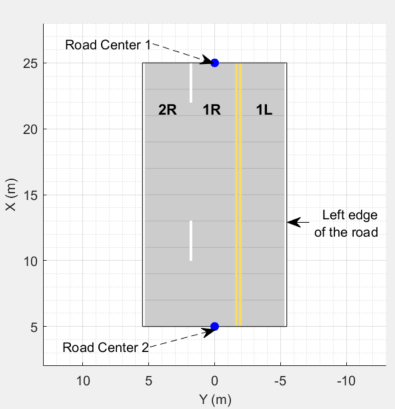
车道必须从左到右编号,道路的左边缘相对于道路的绘制方向定义。对于单向路,默认情况下,道路的左边缘是一个实心黄色标记,表示道路横向方向(方向垂直于绘制方向)的终点。对于双向道路,默认情况下,两边都用实线标记。gydF4y2Ba
例如,这些图表显示了单向和双向道路的车道编号,并从上到下绘制方向。gydF4y2Ba
| 单行道上的车道编号gydF4y2Ba | 在双向道路上编号车道gydF4y2Ba |
将车道数指定为单行道的正整数。如果将整数值设置为gydF4y2Ba 1gydF4y2Ba,gydF4y2Ba2gydF4y2Ba,gydF4y2Ba3.gydF4y2Ba分别标明道路的第一、第二和第三车道。gydF4y2Ba
|
将车道数指定为双向道路的两元素正整数向量。如果你将向量设置为[gydF4y2Ba 1 lgydF4y2Ba标明道路上唯一的左车道。gydF4y2Ba1 rgydF4y2Ba而且gydF4y2Ba2 rgydF4y2Ba分别标明道路的第一和第二右车道。gydF4y2Ba
|
车道规范按照车道编号的顺序应用。gydF4y2Ba
复合车道标记gydF4y2Ba
复合车道标记包括沿车道定义多种标记类型的两个或多个标记段。复合车道标记的几何属性包括每种标记类型的几何属性和标记段的归一化长度。gydF4y2Ba
指定的标记段在复合车道标记中出现的顺序取决于道路的绘制方向。每个标记段都是一个有向段,有起点,并向最后一个道路中心移动。第一个标记段从第一个道路中心开始,并以指定的长度向最后一个道路中心移动。第二标记段从第一个标记段的终点开始,并向指定长度的最后一个道路中心移动。相同的过程适用于为复合车道标记指定的每个标记段。属性可以为每个标记段设置规范化长度gydF4y2Ba范围gydF4y2Ba输入参数。gydF4y2Ba
例如,考虑一条有两条车道的单行道。从道路左边缘开始的第二车道标记是具有标记类型的复合车道标记gydF4y2Ba固体gydF4y2Ba而且gydF4y2Ba冲gydF4y2Ba.每种标记类型的标准化范围为0.5。第一标记段为实线标记,第二标记段为虚线标记。这些图表显示了标记段应用于从左到右和从右到左绘制道路方向的顺序。gydF4y2Ba
|
|
|
有关车道标记的几何属性的信息,请参见gydF4y2Ba莱恩规范gydF4y2Ba.gydF4y2Ba
提示gydF4y2Ba
您可以取消(按gydF4y2BaCtrl + ZgydF4y2Ba)和重做(按gydF4y2BaCtrl + YgydF4y2Ba)你在场景和传感器画布上所做的改变。例如,您可以使用这些快捷方式删除最近放置的道路中心或重做雷达传感器的移动。gydF4y2Ba
兼容性的考虑gydF4y2Ba
参考文献gydF4y2Ba
[1]欧洲新车评估计划。gydF4y2Ba欧洲NCAP评估协议- SAgydF4y2Ba.8.0.2版本。2018年1月。gydF4y2Ba
[2]欧洲新车评估计划。gydF4y2Ba欧洲NCAP AEB C2C测试协议gydF4y2Ba.2.0.1版本。2018年1月。gydF4y2Ba
[3]欧洲新车评估计划。gydF4y2Ba欧洲NCAP LSS测试协议gydF4y2Ba.2.0.1版本。2018年1月。gydF4y2Ba
[4] Dupuis, Marius,等。gydF4y2BaOpenDRIVE格式规范gydF4y2Ba.1.4修订版本,H版本,文档号:VI2014.106。德国巴特埃布林:VIRES仿真技术有限公司,2015年11月4日。gydF4y2Ba
另请参阅gydF4y2Ba
应用程序gydF4y2Ba
块gydF4y2Ba
- 雷达探测发生器gydF4y2Ba|gydF4y2Ba场景的读者gydF4y2Ba|gydF4y2Ba视觉检测发生器gydF4y2Ba
对象gydF4y2Ba
drivingScenariogydF4y2Ba|gydF4y2BaradarDetectionGeneratorgydF4y2Ba|gydF4y2BavisionDetectionGeneratorgydF4y2Ba
外部网站gydF4y2Ba
在R2018a中引入gydF4y2Ba
[gydF4y2Ba1gydF4y2Ba]gydF4y2Ba你需要和。签订单独的协议gydF4y2Ba在这里gydF4y2Ba以便访问HDLM服务,并获得使用HERE服务所需的凭据(app_id和app_code)。gydF4y2Ba
选择网站gydF4y2Ba
选择一个网站,在可用的地方获得翻译的内容,并查看当地的活动和优惠。根据您所在的位置,我们建议您选择:gydF4y2Ba.gydF4y2Ba
选择gydF4y2Ba网站gydF4y2Ba您也可以从以下列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- 美国拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba
