使用驾驶场景设计器生成传感器块
这个例子展示了如何使用Simulink®模型更新雷达和摄像机传感器金宝app驾驶场景设计师驾驶场景设计应用程序使您能够快速和交互式地生成多个传感器配置。然后,您可以在现有的Simulink模型中使用这些生成的传感器配置来更彻底地测试您的驾驶算法。金宝app
检查和模拟模型
本例中使用的模型实现了自主紧急制动(AEB)传感器融合算法,并配置为模拟行人碰撞场景。有关此模型的详细信息,请参见自动紧急制动与传感器融合的例子。打开模型。
open_system (“AEBTestBenchExample”)

用于测试算法的驾驶场景和传感器检测生成器位于车辆环境>参与者和传感器仿真子系统。打开这个子系统。
open_system (“AEBTestBenchExample/车辆和环境/参与者和传感器模拟”)
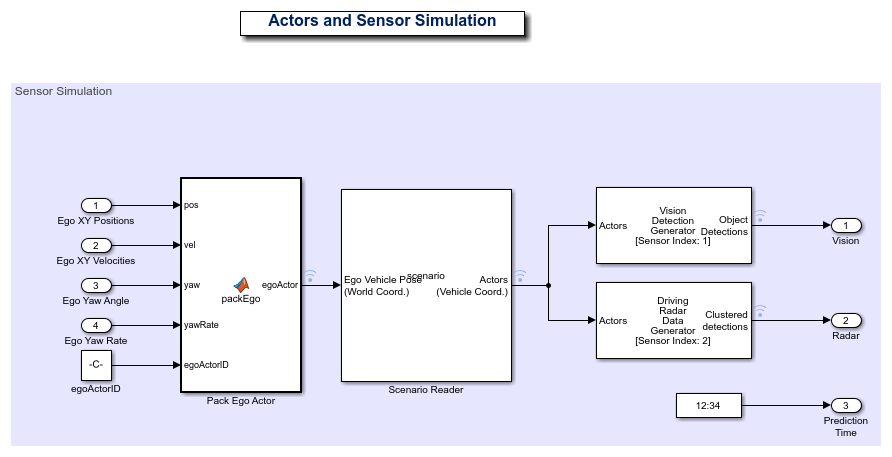
一个场景的读者块从指定的Driving Scenario Designer文件中读取角色和道路。块输出非自我参与者。这些演员随后被传递给驾驶雷达数据发生器和视觉检测发电机传感器模块。在模拟过程中,这些块产生对非自我行为者的检测。
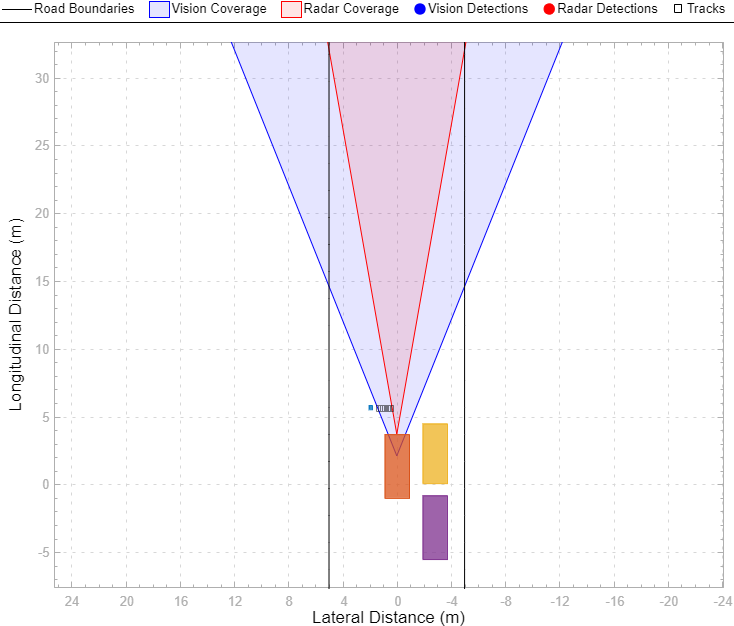
模拟和可视化场景鸟瞰的范围.在模型工具条上,在审查结果,点击鸟瞰的范围.在范围中,单击找到信号,然后单击运行来运行模拟。在这种情况下,AEB模型使自我车辆及时刹车,以避免与正在过马路的行人儿童相撞。
在本例中,您将使用Driving Scenario Designer应用程序中创建的新传感器替换该模型中的现有传感器。
App加载场景
该模型使用一个基于预先构建的Euro NCAP测试协议场景的驱动场景。您可以从驾驶场景设计器应用程序加载这些场景。有关这些场景的更多细节,请参见欧洲NCAP驾驶场景设计.
将场景文件加载到应用程序中。
drivingScenarioDesigner (“AEB_PedestrianChild_Nearside_50width_overrun.mat”)
要在应用程序中模拟场景,单击运行.与模型模拟不同,在应用程序模拟中,ego车辆与行人相撞。该应用程序使用预定义的自我车辆轨迹,而模型使用AEB算法来控制轨迹,并导致自我车辆刹车。

负荷传感器
加载的场景文件只包含场景中的道路和角色。一个单独的文件包含传感器。要将这些传感器加载到场景中,请在应用程序工具条上选择打开>传感器.打开AEBSensor.mat文件位于示例文件夹中。或者,从你的MATLAB根文件夹,导航到并打开这个文件:matlabroot/ /开/ AEBSensors.mat例子.
雷达传感器安装在ego汽车的前保险杠上。一个摄像头传感器安装在自我汽车的前窗。

更新传感器
更新雷达和摄像机传感器,改变它们在ego车上的位置。
在传感器的画布,单击并拖动雷达传感器到预定义的位置
前窗的位置。点击并拖动摄像机传感器到预定义的位置
前保险杠的位置。在这个预先设定的位置,应用程序将摄像头从近程传感器升级为远程传感器。可选地,在左侧窗格中传感器选项卡,尝试修改摄像机和雷达传感器的参数。例如,您可以更改检测概率或精度和噪声设置。
将此新场景和传感器配置的副本保存到可写位置。
有关在应用程序中使用传感器的更多细节,请参见交互式创建驾驶场景,生成合成传感器数据.
此图像显示了更新后的传感器配置示例。

将场景和传感器导出到Simulink金宝app
要为场景及其传感器生成S金宝appimulink块,请在应用程序工具条上选择导出Simulink模型金宝app.这个模型显示了从应用程序导出的样本块。
open_system (“AEBGeneratedScenarioAndSensors”)

如果您没有更改场景中的道路和角色,那么scenario Reader块将读取AEB模型中使用的相同的道路和角色数据。驾驶雷达数据生成器和视觉检测生成器模块模型的雷达和相机,你创建的应用程序。
将导出的场景和传感器复制到现有模型中
使用新生成的场景和传感器替换AEB模型中的场景和传感器。即使您没有修改道路和角色,也没有从相同的场景文件中读取数据,替换现有的scenario Reader块仍然是最佳实践。当数据在场景和传感器之间传递时,使用这个生成的块可以保持总线名称的一致性。
要开始,在AEB模型中,重新打开车辆环境>参与者和传感器仿真子系统。
open_system (“AEBTestBenchExample/车辆和环境/参与者和传感器模拟”)
接下来,使用生成的场景和传感器块来处理场景和传感器块,遵循以下步骤:
删除已有的“场景读取器”、“驾驶雷达数据发生器”和“视觉检测发生器”模块。不能删除Scenario Reader模块输入或传感器模块输出的信号线。或者,断开这些块而不删除它们,并将它们从模型中注释掉。使用此选项,您可以将现有块与新块进行比较,并在需要时恢复原状。选择每一块。然后,在块选项卡上,选择注释掉.
将生成的模型中的块复制到AEB模型中。
打开复制的Scenario Reader块并设置自我载体的来源参数
输入端口.点击好吧.AEB模型在Pack ego Actor块中定义了ego车辆,您可以将其连接到自我的车辆场景Reader块的端口。连接现有的信号线到复制的块。为了清理模型的布局,在格式标签的模型,选择自动排列.
验证更新后的子系统框图是否与预先存在的框图相似。然后,保存模型,或将模型的副本保存到可写的位置。
模拟模型更新
要可视化更新后的场景模拟,请重新打开鸟瞰镜,单击找到信号,然后单击运行.使用这种更新的传感器配置,ego车辆不能及时刹车。

要尝试不同的传感器配置,请在应用程序中重新加载场景和传感器,导出新的场景和传感器,并复制到AEB模型中。
另请参阅
应用程序
块
相关的话题
你也可以从以下列表中选择一个网站:
