欧洲ncap.驾驶场景设计中的驾驶场景
的驾驶场景设计师app提供了一个代表欧洲新车评估计划(Euro NCAP)的预建场景库®)测试协议。该应用包括用于测试自主紧急制动(AEB),紧急车道保持(麋鹿)和车道的方案,以及Lane保持辅助(LKA)系统。
选择一个欧洲ncap.场景
首先,打开驾驶场景设计师应用程序,在MATLAB®命令提示符,输入Drivingscenariodesigner.。
在应用程序中,欧洲NCAP方案存储为MAT文件并组织到文件夹中。要在App ToolStrip上打开欧洲NCAP文件,请选择开放>预先构建的场景。的PrebuiltScenarios文件夹打开,其中包含应用程序中可用的所有预构建场景的子文件夹(参见在驾驶场景设计中预建的驾驶场景)。
双击EuroNCAP文件夹,然后从其中一个子文件夹中选择欧元ncap方案。
自动紧急制动
这些场景是为了测试自动紧急制动(AEB)系统而设计的。AEB系统在即将发生碰撞时向驾驶员发出警告,并自动刹车以防止碰撞或减少碰撞的影响。一些AEB系统使车辆和约束系统为冲击做好准备。该表描述了AEB场景的一个子集。
| 文档名称 | 描述 |
|---|---|
AEB_Bicyclist_Longitudinal_25width.mat |
自我车与前面骑自行车的人相撞。在碰撞前,骑自行车的人与自驾车沿纵轴沿同一方向行驶。在碰撞的时候,自行车的宽度是自我车的25%。
附加场景在碰撞时间内变化自行车的位置。 |
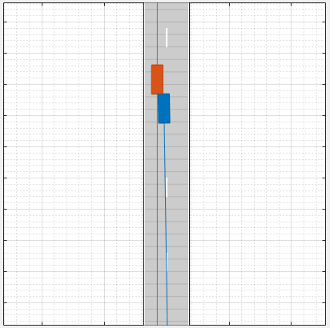
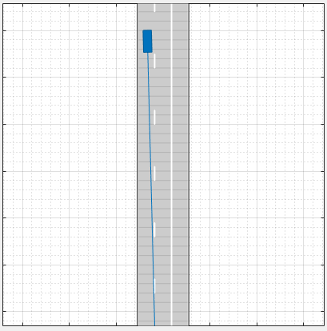
AEB_CCRb_2_initialGap_12m.mat |
汽车到车载后制动(CCRB)场景,自助式车辆后端制动车辆。制动车辆开始在2米/秒下减速2。自我车与制动车之间的初始间隙为12米。
附加场景改变自我车辆和制动车辆之间的减速量和初始间隙。 |
aeb_ccrm_50overlap.mat |
汽车到车轮后移动(CCRM)场景,当时车辆倒端移动车辆。在碰撞时间,自我车辆与移动车辆的宽度的50%重叠。
附加场景会改变重叠的数量和重叠的位置。 |
aeb_ccrs_-75overlap.mat |
一种车对车的尾部静止(CCRs)场景,其中ego车辆追尾了一辆静止的车辆。在碰撞时,自我车辆与静止车辆宽度的-75%重叠。当自我车在另一辆车的左边时,重叠率是负的。
附加场景会改变重叠的数量和重叠的位置。 |
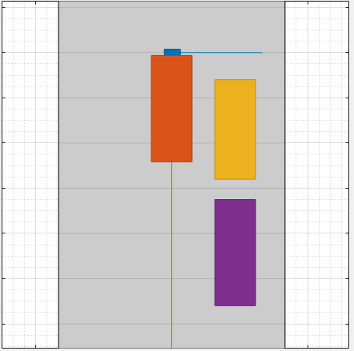
AEB_Pedestrian_Farside_50width.mat |
自我车辆与行人从道路左侧行驶的行人碰撞,欧洲NCAP测试协议是指的远端。这些协议假定车辆在道路的右侧行驶。因此,道路左侧是离自我车最远的一侧。在碰撞的时候,行人是横穿车辆宽度的50%。
其他方案在碰撞时间变化行人的位置。 |
AEB_PedestrianChild_Nearside_50width.mat |
ego汽车撞上了从路右侧行驶的行人,这是欧洲NCAP测试协议的简称近侧。这些协议假定车辆在道路的右侧行驶。因此,道路的右侧是最接近自我车辆的一侧。在碰撞的时候,行人是横穿车辆宽度的50%。
|
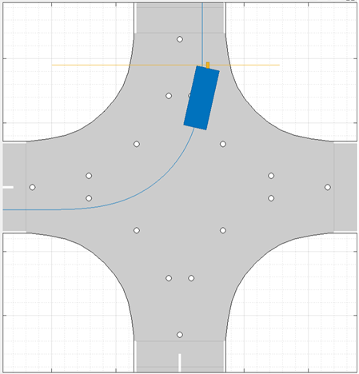
AEB_PedestrianTurning_Farside_50width.mat |
在模拟开始时,ego车辆在十字路口转弯并与与车辆左侧或远侧平行行驶的行人相撞。在碰撞的时候,行人是横穿车辆宽度的50%。
在另一种情况下,在模拟开始时,行人在交叉路口的另一边,并与车辆的右侧或近侧平行行驶。 |
Reverse_AEB_Pedestrian_Stationary_50width.mat |
自我车辆逆转并与固定行人碰撞。在碰撞的时候,行人是横穿车辆宽度的50%。
在另一种情形中,在碰撞之前,行人从车辆的前参考系的右侧或近侧行驶。 |






应急车道保持
这些方案旨在测试紧急车道保持(麋鹿)系统。麋鹿系统防止即将发生的即将到来的驾驶员的碰撞,无意的车道离开。该表描述了ELK方案的子集。
| 文档名称 | 描述 |
|---|---|
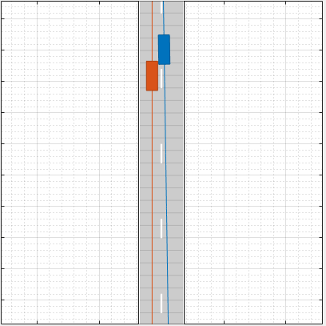
elk_fasterovertakingveh_intent_vlat_0.5.mat |
自我车故意变道并与另一条车道上的更快的超车相撞。ego汽车以0.5 m/s的横向速度行驶。
附加的情况会改变横向速度,以及车道的改变是有意还是无意的。 |
ELK_OncomingVeh_Vlat_0.3.mat |
自我车无意中改变车道,与对面车道迎面而来的车辆相撞。ego汽车以0.3米/秒的横向速度行驶。
附加场景变化横向速度。 |
elk_overtakingveh_unintent_vlat_0.3.mat |
自我车辆无意地改变车道,超越了另一个车道中的车辆,并与该车辆碰撞。ego汽车以0.3米/秒的横向速度行驶。
附加的情况会改变横向速度,以及车道的改变是有意还是无意的。 |
ELK_RoadEdge_NoBndry_Vlat_0.2.mat |
自我车无意中改变了车道,最终停在了路边。道路边缘没有车道边界标记。ego汽车以0.2 m/s的横向速度行驶。
附加的情况改变横向速度和道路边缘是否有固体边界,虚线边界,或没有边界。 |


车道保持辅助
这些场景是设计来测试车道保持辅助(LKA)系统的。LKA系统检测无意识车道偏离,并自动调整车辆的转向角度,使其保持在车道边界内。该表列出了LKA场景的一个子集。
| 文件名 | 描述 |
|---|---|
lka_dashedline_solid_left_vlat_0.5.mat |
自我车无意中偏离了一条左冲右实的车道。汽车从左侧(虚线)驶离车道,以0.5米/秒的横向速度行驶。
附加的情况是改变横向速度,以及车辆穿过的虚线是在左边还是右边。 |
LKA_DashedLine_Unmarked_Right_Vlat_0.5.mat |
“自我”车无意中偏离了一条右侧被冲过而左侧没有标记的车道。汽车从右侧(虚线)驶离车道,以0.5米/秒的横向速度行驶。
其他的情况是改变横向速度和虚线标记的车辆是在左边或右边。 |
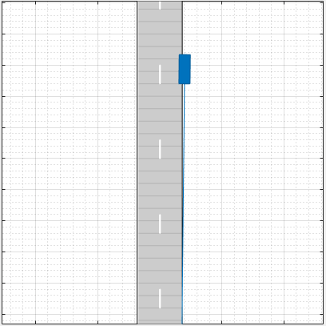
LKA_RoadEdge_NoBndry_Vlat_0.5.mat |
自我车无意中偏离了车道,最终停在了路边。道路边缘没有车道边界标记。汽车以0.5米/秒的横向速度行驶。
附加场景变化横向速度。 |
lka_roadedge_nomarkings_vlat_0.5.mat |
自我车无意中偏离了车道,最终停在了路边。这条路没有车道标记。汽车以0.5米/秒的横向速度行驶。
附加场景变化横向速度。 |
lka_solidline_dashed_left_vlat_0.5.mat |
自我车无意中偏离了左边坚实的车道,在右边猛冲。汽车从左侧(实侧)驶出车道,以0.5米/秒的横向速度行驶。
另外,车辆的横向速度和穿越的固体车道标志是在左边还是右边也会发生变化。 |
LKA_SolidLine_Unmarked_Right_Vlat_0.5.mat |
自助式车辆无意中从右侧和左侧标记的固体巷道出发。汽车从右侧(固体)侧离开车道,以0.5米/秒的横向速度行驶。
另外,车辆的横向速度和穿越的固体车道标志是在左边还是右边也会发生变化。 |




修改场景
默认情况下,在欧元NCAP方案中,自助式车辆不包含传感器。如果您在App ToolStrip上测试了车辆传感器,请单击添加相机要么添加雷达给自我车加个传感器。然后,在传感器选项卡,调整传感器的参数,以匹配您的传感器型号。如果你正在测试一个摄像头传感器,使摄像头能够检测到车道,扩大检测参数部分,并设置检测类型来车道和对象。
你也可以在场景中调整道路和角色的参数。例如,从演员左侧标签,可以更改自助式车辆或其他演员的位置或速度。来自道路选项卡,您可以更改通道的宽度或车道标记的类型。
生成合成检测
要从任何添加的传感器生成检测,请单击运行。随着场景的运行,自我中心视图从自助式车辆的角度显示方案。的鸟瞰的情节显示检测。

出口的检测。
要将传感器数据导出到MATLAB工作空间,在app工具条上,选择出口>出口传感器数据。命名工作区变量,然后单击好。该应用程序将传感器数据保存为一个结构,其中包含传感器数据,如每个时间步长的演员姿态、物体检测和车道检测。
为了导出生成场景及其传感器数据的MATLAB函数,选择出口>出口MATLAB功能。此功能将传感器数据作为结构,方案作为一个结构
drivingScenario对象,传感器模型为visionDetectionGenerator,radarDetectionGenerator,和lidarPointCloudGenerator系统对象。通过修改此函数,您可以创建原始场景的变体。有关此过程的示例,请参见以编程方式创建驾驶场景变化。
保存方案
因为Euro NCAP场景是只读的,所以将驱动场景的副本保存到一个新的文件夹中。保存场景文件,在app工具条上,选择保存>场景文件as.。
您可以从应用程序中重新打开这个场景文件。或者,在MATLAB命令提示符下,您可以使用此语法。
drivingScenarioDesigner (scenarioFileName)
drivingScenario对象。在MATLAB命令提示符下,使用以下语法,其中场景导出对象的名称。drivingScenarioDesigner(场景)
传感器是传感器对象或此类对象的单元阵列。drivingScenarioDesigner(场景、传感器)
drivingScenario对象进入您的模型。此块不直接读取传感器数据。要将在应用程序中创建的传感器添加到Simulink模型,请通过选择来生成包含场景和传感器的模型金宝app出口>出口仿真软件模金宝app型。在模型中,生成的场景的读者块读取方案,生成的传感器块定义传感器。
参考资料
欧洲新车评估计划。欧洲NCAP评估协议 - SA。8.0.2版本。2018年1月。
欧洲新车评估计划。欧洲NCAP AEB C2C测试协议。2.0.1版本。2018年1月。
欧洲新车评估计划。欧洲NCAP LSS测试协议。2.0.1版本。2018年1月。
另请参阅
应用程序
块
对象
相关话题
外部网站
您还可以从以下列表中选择一个网站:
