visionDetectionGenerator
为驾驶场景生成视觉检测
描述
的visionDetectionGenerator系统对象™产生从一个单眼相机传感器安装在一个自我检测车辆。所有的检测都是自我的参考坐标系统车辆或车载传感器。您可以使用visionDetectionGenerator对象包含演员和轨迹在一个场景中,您可以创建使用drivingScenario对象。使用一个统计模式,发电机可以模拟真实的检测还添加随机噪声和产生错误的报警检测。此外,您可以使用visionDetectionGenerator对象创建的输入multiObjectTracker。在构建场景使用驾驶场景设计师应用,相机传感器安装在自我车辆输出visionDetectionGenerator对象。
产生视觉检测:
创建
visionDetectionGenerator对象并设置其属性。调用对象的参数,就好像它是一个函数。
了解更多关于系统对象是如何工作的,看到的系统对象是什么?(MATLAB)。
创建
语法
描述
传感器= visionDetectionGenerator
传感器= visionDetectionGenerator (cameraConfig)monoCamera配置对象,cameraConfig。
属性
使用
语法
描述
lanedets=传感器(laneboundaries,时间)lanedets从车道边界结构,laneboundaries。
启用这个语法DetectionOutput来“只道”。车道检测器生成车道边界在指定的时间间隔LaneUpdateInterval财产。
lanedets=传感器(演员,laneboundaries,时间)lanedets从车道边界结构,laneboundaries。
要启用这种语法,集DetectionOutput来“道与阻塞”。车道检测器生成车道边界在指定的时间间隔LaneUpdateInterval财产。
(___,还返回的有效的检测报告,numValidDets)=传感器(___)numValidDets。
(___,返回一个逻辑值,numValidDetsisValidTime)=传感器(___)isValidTime,这表明UpdateInterval生成检测的时间已经用完了。
(返回对象检测,依据,numValidDets,isValidTime,lanedets,numValidLaneDets,isValidLaneTime)=传感器(演员,laneboundaries,时间)依据和车道检测lanedets。这个语法也返回有效的车道检测报告的数量,numValidLaneDets一个标志,isValidLaneTime,表明是否需要模拟生成车道检测的时间已经用完了。
要启用这种语法,集DetectionOutput来车道和对象的。
输入参数
输出参数
对象的功能
使用一个目标函数,指定系统对象作为第一个输入参数。例如,释放系统资源的系统对象命名obj使用这个语法:
发行版(obj)
例子
生成的视觉检测多个车辆
生成检测使用前置汽车视觉传感器安装在一个自我。假设有两个目标车辆:
车辆1是直接在前面的自我,以同样的速度移动。
车辆2车辆驾驶速度超过12公里的自我车辆在左边的车道。
所有位置、速度和测量是相对于自我。运行仿真的十个步骤。
dt = 0.1;car1 =结构(“ActorID”,1“位置”(100 0 0),“速度”(5 * 1000/3600 0 0));car2 =结构(“ActorID”2,“位置”(150 10 0),“速度”(12 * 1000/3600 0 0]);
创建一个汽车视觉传感器从自我车辆位置偏移。默认情况下,传感器的位置是在(3.4,0)米的车辆中心和飞机离地面1.1米. .
传感器= visionDetectionGenerator (“DetectionProbability”,1…“MinObjectImageSize”,5 [5],“MaxRange”,200,“DetectionCoordinates”,传感器笛卡儿的);追踪= multiObjectTracker (“FilterInitializationFcn”@initcvkf,…“ConfirmationParameters”(3 - 4),“NumCoastingUpdates”6);
产生视觉检测non-ego演员当他们移动。输出检测单元阵列。只提取检测通过的位置信息multiObjectTracker,预计只有位置信息。更新每个新的检测的跟踪。
simTime = 0;nsteps = 10;为k = 1: nsteps侦破=传感器([car1 car2], simTime);n =大小(侦破,1);为k = 1: n量=侦破{k} .Measurement (1:3);依据k {}。测量=量;measmtx =侦破{k} .MeasurementNoise (1:3, 1:3);依据k {}。MeasurementNoise = measmtx;结束[confirmedTracks, tentativeTracks allTracks] = updateTracks(记录、侦破、simTime);simTime = simTime + dt;car1。位置= car1。位置+ dt*car1.Velocity; car2.Position = car2.Position + dt*car2.Velocity;结束
使用birdsEyePlot创建一个俯视的检测。传感器覆盖范围。提取x和y通过将目标的位置测量领域的细胞变成一个MATLAB®数组。然后,绘制检测使用birdsEyePlot功能。
BEplot = birdsEyePlot (“XLim”220年[0],“YLim”75年[-75]);caPlotter = coverageAreaPlotter (BEplot,“DisplayName的”,“视觉覆盖范围”);plotCoverageArea (caPlotter sensor.SensorLocation sensor.MaxRange,…sensor.Yaw sensor.FieldOfView (1) detPlotter = detectionPlotter (BEplot,“DisplayName的”,视觉检测的);detPos = cellfun (@ (d) d.Measurement(1:2),精细,“UniformOutput”、假);detPos = cell2mat (detPos ') ';如果~ isempty (detPos) plotDetection (detPlotter detPos)结束

从单眼相机生成视觉检测
创建一个视觉传感器通过使用单眼相机配置,并生成检测传感器。
指定相机的内部参数和创建一个monoCamera从这些参数对象。相机上装的是一个自我车辆的高度离地面1.5米和1度到距地面。
focalLength = (800 - 800);principalPoint = (320 - 240);图象尺寸= (480 - 640);intrinsic = cameraIntrinsics (focalLength principalPoint图象尺寸);身高= 1.5;距= 1;monoCamConfig = monoCamera (intrinsic、身高、“节”、沥青);
创建一个视觉检测发电机使用单眼相机配置。
visionSensor = visionDetectionGenerator (monoCamConfig);
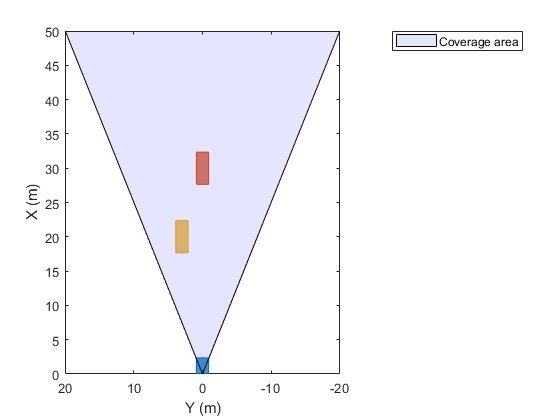
生成一个驾驶场景与自我车辆和两个目标的汽车。第一目标位置车30米正前方自我的工具。第二目标位置的车在前面的自我20米,但是3米向左偏移。
场景= drivingScenario;egoVehicle =车辆(场景);targetCar1 =车辆(场景中,“位置”,30 0 0);targetCar2 =车辆(场景中,“位置”[20 3 0]);
使用一个鸟瞰的情节显示车辆轮廓和传感器覆盖范围。
图cep = birdsEyePlot (“XLim”,50 [0],“YLim”20 [-20]);olPlotter = outlinePlotter (cep);(位置、偏航、长度、宽度、originOffset color] = targetOutlines (egoVehicle);plotOutline (olPlotter、位置、偏航、长度、宽度);caPlotter = coverageAreaPlotter (cep),“DisplayName的”,“覆盖范围”,“FaceColor”,“蓝”);plotCoverageArea (caPlotter visionSensor.SensorLocation visionSensor.MaxRange,…visionSensor.Yaw visionSensor.FieldOfView (1))
获得目标的提出了汽车车辆从自我的角度。使用这些姿势来生成检测的传感器。
提出了= targetPoses (egoVehicle);[侦破,numValidDets] = visionSensor(姿势,scenario.SimulationTime);
显示(X,Y)位置的有效检测。对于每个检测,(X,Y)职位的第一个两个值测量字段。
为i = 1: numValidDets XY =侦破{我}.Measurement (1:2);detXY = sprintf (“检测% d: X = %。2 f米,Y = %。2 f米”,我,XY);disp (detXY)结束
检测1:X = 19.09米,2:Y = 2.79米检测X = 27.81米,Y = 0.08米
生成对象和车道边界检测
创建一个驾驶场景包含一个自我车辆和目标车辆沿着三车道公路旅行。检测车道边界通过使用视觉检测发电机。
场景= drivingScenario;
创建一个三车道公路通过车道规范。
roadCenters = [0 0 0;60 0 0;120年30 0];lspc = lanespec (3);路(场景、roadCenters“道”,lspc);
指定车辆自我中心巷在30 m / s。
egovehicle =车辆(场景);egopath = (1.5 0 0;60 0 0;111年25 0];egospeed = 30;轨迹(egovehicle egopath egospeed);
指定目标车辆旅行前的自我车辆40 m / s和变更车道车辆接近自我。
targetcar =车辆(场景中,“ClassID”2);定位路径= [8 2;60 -3.2;120年33];targetspeed = 40;定位路径轨迹(targetcar, targetspeed);
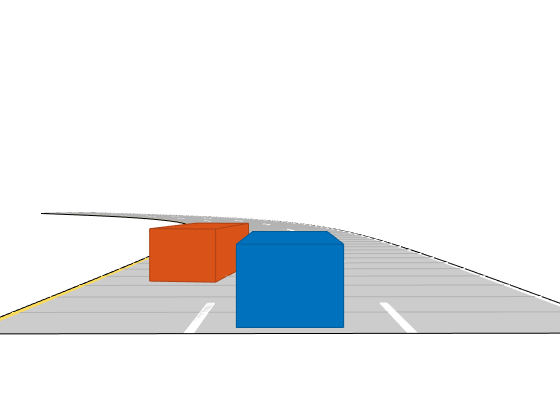
的3 d视图显示一个追逐情节场景从自我后面车辆。
chasePlot (egovehicle)
创建一个视觉检测发电机检测车道和对象。场上的传感器点一度下降。
visionSensor = visionDetectionGenerator (“节”,1.0);visionSensor。DetectorOutput =车道和对象的;visionSensor。ActorProfiles= actorProfiles(scenario);
运行仿真。
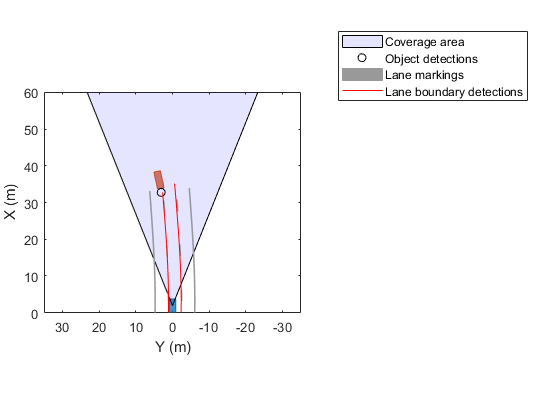
创建一个鸟瞰的情节和相关的策划者。
显示传感器覆盖范围。
显示车道标记。
在路上获得地面实况提出的目标。
获得理想的车道边界点提前60米。
从理想目标姿态和生成检测车道边界。
显示目标的轮廓。
显示对象时检测对象检测是有效的。
显示巷巷时边界检测是有效的。
cep = birdsEyePlot (“XLim”,60 [0],“YLim”35 [-35]);caPlotter = coverageAreaPlotter (cep),“DisplayName的”,“覆盖范围”,…“FaceColor”,“蓝”);detPlotter = detectionPlotter (cep),“DisplayName的”,“对象检测”);lmPlotter = laneMarkingPlotter (cep),“DisplayName的”,“车道标记”);lbPlotter = laneBoundaryPlotter (cep),“DisplayName的”,…“车道边界检测”,“颜色”,“红色”);olPlotter = outlinePlotter (cep);plotCoverageArea (caPlotter visionSensor.SensorLocation,…visionSensor.MaxRange visionSensor.Yaw,…visionSensor.FieldOfView (1));而推进(场景)(lmv, lmf) = laneMarkingVertices (egovehicle);plotLaneMarking (lmv lmPlotter, lmf) tgtpose = targetPoses (egovehicle);lookaheadDistance = 0:0.5:60;磅= laneBoundaries (egovehicle,“XDistance”lookaheadDistance,“LocationType”,“内心”);[obdets, nobdets obValid、lb_dets nlb_dets, lbValid] =…visionSensor (tgtpose磅,scenario.SimulationTime);[objposition, objyaw objlength、objwidth objoriginOffset, color] = targetOutlines (egovehicle);plotOutline (olPlotter、objposition objyaw、objlength objwidth,…“OriginOffset”objoriginOffset,“颜色”、颜色)如果obValid detPos = cellfun (@ (d) d.Measurement (1:2), obdets,“UniformOutput”、假);detPos = vertcat (0 (0, 2), cell2mat (detPos ') ');plotDetection (detPlotter detPos)结束如果lbValid plotLaneBoundary (lbPlotter vertcat (lb_dets.LaneBoundaries))结束结束

配置理想视觉传感器
从理想的视觉传感器生成检测和比较这些检测的噪声传感器。一个理想的传感器是一个总是生成检测,没有假阳性,没有添加随机噪声。
创建一个驾驶场景
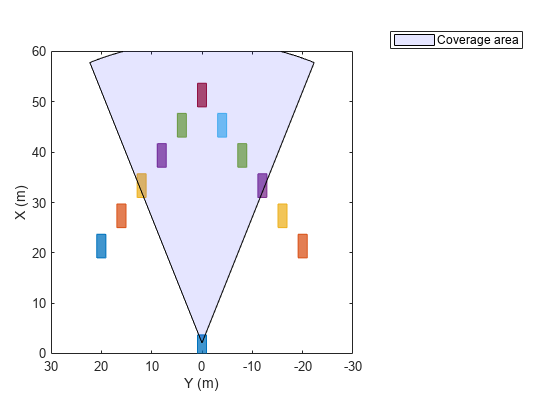
创建一个驾驶场景,在该场景中,前面的自我定位车辆的对角阵目标的汽车。使用这个配置,您可以稍后情节没有检测到目标的测量噪声协方差目标车挡住。
场景= drivingScenario;egoVehicle =车辆(场景);numTgts = 6;x = linspace (20、50、numTgts)”;y = linspace (-20 0, numTgts) ';x = [x, x (1: end-1)];y = [y; - y (1: end-1)];numTgts =元素个数(x);为m = 1: numTgts车辆(场景中,“位置”,(x (m) y (m) 0]);结束
情节的驾驶场景一个鸟瞰的阴谋。
cep = birdsEyePlot (“XLim”,60 [0]);传奇(“隐藏”)olPlotter = outlinePlotter (cep);(位置、偏航、长度、宽度、originOffset color] = targetOutlines (egoVehicle);plotOutline (olPlotter、位置、偏航、长度、宽度、…“OriginOffset”originOffset,“颜色”、颜色)

创建一个理想的视觉传感器
创建一个视觉传感器使用visionDetectionGenerator系统对象™。产生理想的检测,集DetectionProbability来1,FalsePositivesPerImage来0,HasNoise来假。
DetectionProbability = 1——传感器总是生成检测目标,只要目标不是闭塞和满足范围,速度,和图像大小的限制。FalsePositivesPerImage = 0——传感器检测来自驾驶场景中唯一真正的目标。HasNoise = false——传感器不添加随机噪声目标的位置和速度。然而,objectDetection对象返回的传感器测量噪声值设置为噪声方差,如果补充道HasNoise是真正的。这些噪声值,你可以处理的理想检测使用multiObjectTracker。这种技术是非常有用的分析策略滞后而无需运行耗时的蒙特卡罗模拟。
idealSensor = visionDetectionGenerator (…“SensorIndex”,1…“UpdateInterval”scenario.SampleTime,…“SensorLocation”(0.75 * egoVehicle。轴距0),…“高度”,1.1,…“节”0,…“intrinsic”cameraIntrinsics(800, 240年[320],[480]640),…“BoundingBoxAccuracy”,50岁,…%的噪音大,便于说明“ProcessNoiseIntensity”5,…“MaxRange”现年60岁的…“DetectionProbability”,1…“FalsePositivesPerImage”0,…“HasNoise”假的,…“ActorProfiles”actorProfiles(场景))
idealSensor = visionDetectionGenerator属性:SensorIndex: 1 UpdateInterval: 0.0100 SensorLocation:[2.1000 0]高度:1.1000偏航:0节:0卷:0 intrinsic: [1 x1 cameraIntrinsics] DetectorOutput:“对象只有”FieldOfView: [43.6028 - 33.3985] MaxRange: 60 MaxSpeed: 50 MaxAllowedOcclusion: 0.5000 MinObjectImageSize: [15 15] DetectionProbability: 1 FalsePositivesPerImage: 0显示所有属性
理想的视觉传感器的覆盖范围。
传奇(“显示”)caPlotter = coverageAreaPlotter (cep),“DisplayName的”,“覆盖范围”,“FaceColor”,“蓝”);mountPosition = idealSensor.SensorLocation;范围= idealSensor.MaxRange;取向= idealSensor.Yaw;fieldOfView = idealSensor.FieldOfView (1);plotCoverageArea (caPlotter mountPosition、范围、定位、fieldOfView);
模拟理想的视觉检测
获得目标的位置。在自我车辆坐标的位置。
gTruth = targetPoses (egoVehicle);
生成时间戳视力检测。这些检测是作为细胞数组返回objectDetection对象。
时间= scenario.SimulationTime;依据= idealSensor (gTruth、时间);
检查测量和测量噪声方差的第一(最左边的)检测。尽管检测是理想的,因此没有添加随机噪声,MeasurementNoise属性显示了值的检测有噪音。
依据{1}.Measurement
ans =6×131.0000 - -11.2237 0 0 0 0
依据{1}.MeasurementNoise
ans =6×61.5427 - -0.5958 0 0 0 0 -0.5958 0.2422 100.0000 0 0 0 0 0 0 0 0 0 0 0 0 0.5398 -0.1675 0 0 0 0 0 0 0 0 0 0 0.1741 -0.1675 100.0000
图2σ的理想检测和椭圆轮廓的测量噪声协方差。
pos = cell2mat (cellfun (@ (d) d.Measurement(1:2)相同,…“UniformOutput”、假));x =重塑(cell2mat (cellfun (@ (d) d.MeasurementNoise(1:2, 1:2),精细,…“UniformOutput”假)”,2,2,[]);绘图机= trackPlotter (cep,“DisplayName的”,“理想的检测”,…“MarkerEdgeColor”,“蓝”,“MarkerFaceColor”,“蓝”);σ= 2;plotTrack(绘图仪、pos、σ^ 2 *浸)

模拟噪声检测进行比较
创建一个噪声传感器基于理想的传感器的属性。
noisySensor =克隆(idealSensor);(noisySensor) noisySensor发布。HasNoise = true;
重置驾驶场景回到原来的状态。
重启(场景)
收集统计信息从嘈杂的检测。
numMonte = 1 e3;pos = [];为itr = 1: numMonte时间= scenario.SimulationTime;依据= noisySensor (gTruth、时间);%保存噪声测量pos = [pos; cell2mat (cellfun (@ (d) d.Measurement(1:2)相同,“UniformOutput”、假));推进(场景);结束
情节吵闹的检测。
绘图机= detectionPlotter (cep,“DisplayName的”,噪声检测的,…“标记”,“。”,“MarkerEdgeColor”,“红色”,“MarkerFaceColor”,“红色”);plotDetection(绘图仪、pos)

扩展功能
另请参阅
对象
drivingScenario|laneMarking|lanespec|lidarPointCloudGenerator|monoCamera|multiObjectTracker|objectDetection|radarDetectionGenerator
