长方体情景模拟
测试自动驾驶使用基于长方体场景和从雷达,相机检测,和激光雷达传感器模型的算法
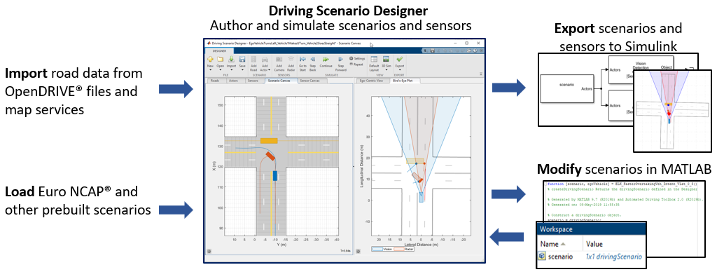
显影自动驾驶系统需要来自现实通信量的情况的传感器数据。通过从模拟驾驶场景产生的合成传感器的检测,可以快速测试你的控制器或传感器融合算法和调整方案。要开始使用,使用驾驶场景设计师程式建立简单的长方体(盒形)场景和统计雷达,相机和激光雷达传感器模型。然后,您可以使用构建场景和传感器模型来执行以下任务:
产生合成的传感器检测并分析输出。
导出场景代码到MATLAB®和编程方式生成的场景变化。
导出场景和传感器的Simulink金宝app®并用它们来测试你的驾驶算法。
- 编程场景创作
编程方式创建通过使用驾驶情况drivingScenario目的 - 互动场景创作
交互方式创建通过使用驾驶情况驾驶场景设计师应用 - 情景导入和导出
从地图服务,如这里HD动态地图,以及进出口OpenDRIVE导入道路®道路 - 在Simulink方案金宝app
测试ADAS和使用合成的驾驶情形在Simulink自动驾驶系统金宝app
您还可以选择从下面的列表中的网站:
