演员
将演员添加到驾驶场景
描述
AC.=演员(设想)演员目的,AC.,到驾驶场景,设想。Actor具有默认属性值。
演员是表示运动中的物体的长方体(框形状),例如汽车,行人和自行车。演员还可以代表可以影响其他演员的运动,例如障碍物的静止障碍物。有关参与者定义的更多详细信息,请参阅演员和车辆位置和尺寸。
例子
创建带有多个演员和道路的驾驶场景
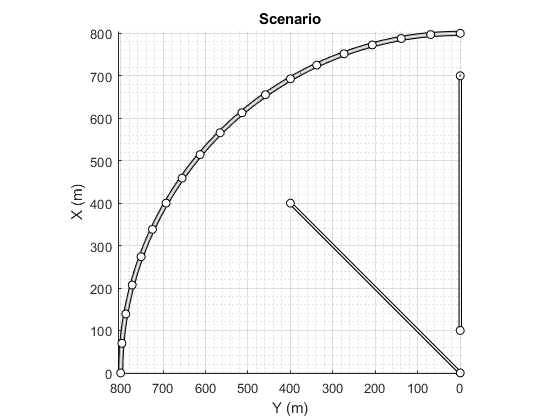
创建含有弯曲道路,两条直路和两个演员的驾驶场景:汽车和自行车。这两个演员都沿着道路移动了60秒。
创建驾驶场景对象。
场景=驱动器通用('采样时间',0.1','停止',60);
使用带有800米半径的圆弧之后的道路中心点创建弯曲道路。电弧在0°开始,以90°结束,并以5°增量采样。
angs = [0:5:90]';r = 800;RoadCenters = R * [COSD(ANG)Sind(Angs)零(尺寸(angs))];roadwidth = 10;道路(情景,跑道,路宽);
用默认宽度添加两条直线道路,在每条道路的两端使用道路中心点。
RoadCenters = [700 0 0;100 0 0];道路(情景,陆路中心)
ANS = HORE属性:名称:“”ROADID:2道路中心:[2x3 DOUBLE] RoadWidth:6 Bankangle:[2x1双]
Roadcenters = [400 400 0;0 0 0];道路(情景,陆路中心)
ans =带有属性的道路:名称:"" RoadID: 3 RoadCenters: [2x3 double] RoadWidth: 6 BankAngle: [2x1 double]
获得道路边界。
rbdry = roadBoundaries(场景);
为场景添加汽车和自行车。将汽车放在第一道路的开头。
汽车=车辆(情景,'班级号',1,“位置”,[700 0 0],......'长度'3,'宽度'2,“高度”,1.6);
将自行车放在路上的地方。
自行车=演员(情景,'班级号'3,“位置”,[706 376 0]',......'长度'2,'宽度', 0.45,“高度”,1.5);
绘制场景。
情节(方案,'中心线'那'在'那'跑步者'那'在');标题(“场景”);
显示演员姿势和配置文件。
提出了= actorPoses(场景)
姿势=2×1结构数组与字段:ACTORID定位速度辊间距偏航Angularvelocity
profiles = ActorProfiles(方案)
个人资料=2×1结构数组与字段:ACTORID CLASSID长度宽度高度原始OFFSET MESHWRETCES MESHFACES RCSPattern RCSAZIMUTHANGLES RCSelevationAngles
在模拟期间在场景中产生和拔出演员
创造一个驾驶场景。将场景设置为3秒钟的停止时间。
场景=驱动器通用('停止',3);
在场景中添加一条双车道道路。
RoadCenters = [0 1 0;53 1 0];lanespecification = lanespec([1 1]);道路(情景,院位道,'车道',报告);
添加另一条道路,以直角与第一道路相交以形成T形。
RoadCenters = [20.3 38.4 0;20 3 0];lanespecification = lanespec(2);道路(情景,院位道,'车道',作用)
Ans = Road与房产:名称:“”Roadid:2道路中心:[2x3 Double] RoadWidth:7.3500 Bankangle:[2x1双]
将自我车辆添加到场景并定义其航点。将自我车速设定为20米/秒,并为自我车辆产生轨迹。
Egovehicle =车辆(场景,'班级号',1,......“位置”,[1.5 2.5 0]);航点= [2 3 0;13 3 0;21 3 0;31 3 0;43 3 0;47 3 0];速度= 20;轨迹(Egovehicle,航点,速度)
将非自我演员添加到方案。通过指定用于进入时间和退出时间的向量设置在模拟期间将非自我演员删除两次。请注意,每个输入时间值小于相应的退出时间值。
nongoActor1 =演员(方案,'班级号',1,......“位置”,[22 30 0],'入口处',[0.2 1.4],'exitteme',[1.0 2.0]);
定义非自我演员的航点。将非自动演员速度设置为30米/秒并产生其轨迹。
路径点= [22 35 0;22日23日0;22日13 0;22日7 0;18 -0.3 0;12个-0.8 0;3 -0.8 0];速度= 30;轨迹(nonEgoactor1、锚点、速度)
将另一个非自我演员添加到场景中。通过指定作为正标量的条目时间,在模拟期间设置第二个非自我演员以在模拟中产生一次。由于您未指定退出时间,因此此Actor将保留在方案结束之前。
nonEgoactor2 =演员(场景中,'班级号',1,......“位置”(48 1 0),'入口处',2);
定义第二个非自我演员的航点。将演员速度设置为50米/ s并生成其轨迹。
航点= [48 -1 0;42-1 0;28 -1 0;16 -1 0;12 -1 0];速度= 50;轨迹(NOTGOACTOR2,航点,速度)
创建自定义图形窗口以绘制方案。
图=图;套(图,“位置”,[0 0 600 600])MOVEGUI(图,'中央'hViewPnl = uipanel(图,“位置”,[0 0 1 1],“标题”那'演员产卵和挖掘');hplt =轴(hviewpnl);
绘制场景并运行模拟。观察非自我演员如何在仿真运行时在场景中产生和拔下。
情节(方案,'waypoints'那'在'那'父母',hplt)尽管前进(方案)暂停(0.1)结尾

输入参数
设想-驾驶场景
驱动器Cenario.目的
驱动场景,指定为a驱动器Cenario.目的。
名称值对参数
指定可选的逗号分离对名称,价值论点。名称是参数名称和价值是相应的价值。名称必须出现在引号内。您可以以任何顺序指定多个名称和值对参数Name1, Value1,…,的家。
'高度',1.7创建时将演员的高度设置为1.7米。
'名称'-演员的名字
“(默认)|字符向量|字符串标量
演员的名称,指定为逗号分隔的配对组成'名称'和一个字符矢量或字符串标量。
例子:“名称”、“Actor1”
例子:“名称”,“Actor1”
数据类型:char|细绳
'入口处'-演员产卵的入学时间
0.(默认)|正标量|正值矢量
演员在驾驶场景中产生的演员的入口时间,指定为逗号分隔的对'入口处'和正标量或正值的矢量。单位是以秒为单位的,从方案的开始时间测量。
指定此名称值对参数以在仿真运行时在指定时间添加或制作演员在指定时间的驱动方案中出现。
只需一次生成一个演员一次,将条目时间指定为标量。
要多次生成演员,请将入门时间指定为向量。
按升序排列矢量的元素。
向量的长度必须与退出时间向量的长度匹配。
如果Actor具有相关的退出时间,则每个条目时间值必须小于相应的退出时间值。
每个条目时间值必须小于方案的停止时间。您可以通过指定值的值来设置方案的停止时间
'停止'财产的驱动器Cenario.目的。
例子:“EntryTime”,2
例子:'entrytime',[2 4]
数据类型:单身的|双倍的|INT8.|int16|INT32.|INT64.|uint8.|uint16|UINT32|UINT64
'exitteme'-演员拔出的退出时间
正(默认)|正标量|正值矢量
从驾驶场景挖掘演员的退出时间,指定为包括的逗号分隔对'exitteme'和正标量或正值的矢量。单位是以秒为单位的,从方案的开始时间测量。
指定此名称值对参数以在模拟运行时在指定时间的方案中从方案中删除或使演员消失。
要挖掘一次演员,请指定作为标量的退出时间。
要多次挖掘演员,请将退出时间指定为向量。
按升序排列矢量的元素。
向量的长度必须与入口时间向量的长度匹配。
如果Actor具有相关的输入时间,则每个退出时间值必须大于相应的输入时间值。
每个退出时间值必须小于方案的停止时间。您可以通过指定值的值来设置方案的停止时间
'停止'财产的驱动器Cenario.目的。
例子:“ExitTime”,3
例子:'exitteme',[3 6]
数据类型:单身的|双倍的|INT8.|int16|INT32.|INT64.|uint8.|uint16|UINT32|UINT64
'plotcolor'-显示actor的颜色
RGB三重态|十六进制颜色代码|颜色名称|短颜色名称
显示actor的颜色,指定为逗号分隔的配对'plotcolor'和RGB三联,十六进制颜色代码,颜色名称或短颜色名称。
Actor在所有程序化方案可视化中出现在特定颜色中,包括阴谋功能,胡访功能和绘图功能Birdseyeplot.对象。如果将场景导入其中驾驶场景设计师应用程序,然后演员以此颜色出现在所有应用程序可视化中。如果将该方案导入Simulink金宝app®,然后演员在这种颜色中出现鸟瞰。
如果您没有为actor指定颜色,则该函数将基于的默认颜色顺序分配一个颜色轴对象。有关详细信息,请参见colorOrder.财产轴对象。
有关自定义颜色,请指定RGB三态或十六进制颜色代码。
RGB三联网是一个三元素行向量,其元素指定了红色,绿色和蓝色组件的强度。强度必须在范围内
[0,1];例如,[0.4 0.6 0.7]。十六进制颜色代码是字符向量或以哈希符号开头的字符串标量(
#),然后是3个或6个十六进制数字,其范围可以是0.到F。这些值不区分大小写。因此,颜色代码'#ff8800'那'#ff8800'那'#f80', 和'#f80'是等同的。
或者,您可以按名称指定一些常见颜色。此表列出了名为Color选项,等效RGB三元组和十六进制颜色代码。
| 颜色名称 | 简称 | RGB三重态 | 十六进制颜色代码 | 外貌 |
|---|---|---|---|---|
'红色的' |
'r' |
[1 0 0] |
'#ff0000' |
|
'绿色' |
'G' |
[0 1 0] |
'#00ff00' |
|
'蓝色的' |
'B' |
(0 0 1) |
'#0000ff' |
|
'青色' |
'C' |
[0 1 1] |
'#00ffff' |
|
“红色” |
“米” |
[1 0 1] |
'#ff00ff' |
|
'黄色' |
'是' |
[1 1 0] |
'#ffff00' |
|
'黑色的' |
“k” |
(0 0 0) |
# 000000的 |
|
'白色的' |
'W' |
[1 1] |
'#ffffff' |
|
以下是RGB三元组和默认颜色MATLAB的十六进制颜色代码®在许多类型的图中使用。
| RGB三重态 | 十六进制颜色代码 | 外貌 |
|---|---|---|
[0 0.4470 0.7410] |
'#0072bd' |
|
[0.8500 0.3250 0.0980] |
'#d95319' |
|
[0.9290 0.6940 0.1250] |
'#edb120' |
|
(0.4940 0.1840 0.5560) |
'#7e2f8e' |
|
[0.4660 0.6740 0.1880] |
“# 77 ac30” |
|
(0.3010 0.7450 0.9330) |
“# 4 dbeee” |
|
[0.6350 0.0780 0.1840] |
'#a2142f' |
|
“位置”-演员中心的位置
(0 0 0)(默认)|[XyZ.]真实值的矢量
角色中心的位置,指定为逗号分隔的对,包括“位置”和 [XyZ.实值向量。
演员的中心是[L./ 2.W./ 2.B.], 在哪里:
L./ 2是演员长度的中点L.。
W./ 2是演员宽度的中点W.。
B.是长方体的底部。
单位是米。
例子:[10; 50; 0]
'速度'-演员中心的速度
(0 0 0)(默认)|[V.XV.yV.Z.]真实值的矢量
速度 (V.)演员中心X- ,y- 和Z.- 指定为逗号分隔对组成的'速度'和[V.XV.yV.Z.实值向量。这“位置”名称值对指定演员中心。单位每秒米。
例子:[-4; 7; 10]
'偏航'-演员的偏航角
0.(默认)|真正的标量
参与者的偏航角度,指定为逗号分隔的配对组成'偏航'和一个真正的标量。偏航行动者的旋转角度是围绕Z.-轴。在轴的向前方向上观察从地面上看时,横摆在轴的前进方向上。因此,当从顶部观察演员时,例如在鸟瞰图上,横摆被逆时针阳性。角度值包裹在范围[-180,180]。单位是度数。
例子:-0.4
'沥青'-演员的螺距角度
0.(默认)|真正的标量
参与者的螺距角度,指定为逗号分隔对组成'沥青'和一个真正的标量。球场行动者的旋转角度是围绕y- 在轴的向前方向上看时,轴是顺时针正的。角度值包裹在范围[-180,180]。单位是度数。
例子:5.8
'卷'-演员的滚动角
0.(默认)|真正的标量
演员的滚动角度,指定为逗号分隔对'卷'和一个真正的标量。卷行动者的旋转角度是围绕X- 在轴的向前方向上看时,轴是顺时针正的。角度值包裹在范围[-180,180]。单位是度数。
例子:-10
'角速度'-角度的角速度
(0 0 0)(默认)|[ωXωyωZ.]真实值的矢量
角速度 (ω)在世界坐标的演员中,指定为逗号分隔的配对'角速度'和[ωXωyωZ.实值向量。单位是每秒度数。
例子:[20 40 20]
'长度'-演员的长度
4.7(默认)|积极的真正标量
演员的长度,指定为逗号分隔对组成'长度'和一个积极的标量。单位是米。
例子:5.5
'宽度'-宽度的演员
1.8(默认)|积极的真正标量
演员的宽度,指定为逗号分隔的配对组成'宽度'和一个积极的标量。单位是米。
例子:3.0
“高度”-演员的高度
1.4(默认)|积极的真正标量
参与者的高度,指定为逗号分隔的配对组成“高度”和一个积极的标量。单位是米。
例子:2.1
'网'-扩展对象网格
extendedObjectMesh目的
扩展对象网格,指定为extendedObjectMesh目的。
'rcspattern'-演员的雷达横截面图案
[10 10;10 10](默认)|问:——- - - - - -P.实验矩阵
雷达横截面(RCS)模式的参与者,指定为逗号分隔对组成'rcspattern'A.问:——- - - - - -P.实值矩阵。RCS是方位角和高程角度的函数,其中:
问:是由此指定的高度角度的数量
'rcselevationangles'名称值对。P.方位角的数目由方位角指定吗
“RCSAzimuthAngles”名称值对。
单位是每平方米(DBSM)分贝。
例子:5.8
“RCSAzimuthAngles”-Actor的Azimuth角度的rcs模式
[-180 180](默认)|P.-element真实值的矢量
Actor的RCS模式的方位角,指定为逗号分隔对组成“RCSAzimuthAngles”A.P.-element真实值的矢量。P.是方位角的数量。值在[-180°,180°]范围内。
每个元素rcsazimuthangles.定义相应列的方位角'rcspattern'名称值对。单位是度数。
例子:[-90:90]
'rcselevationangles'-Actor RCS模式的高度角度
[-90 90](默认)|问:-element真实值的矢量
Actor的RCS模式的高度角度,指定为逗号分隔的配对'rcselevationangles'A.问:-element真实值的矢量。问:是高度角度的数量。值在[-90°,90°]范围内。
每个元素rcselevationangles.定义相应行的仰角rcspattern.财产。单位是度数。
例子:[0:90]
输出参数
更多关于
演员和车辆位置和尺寸
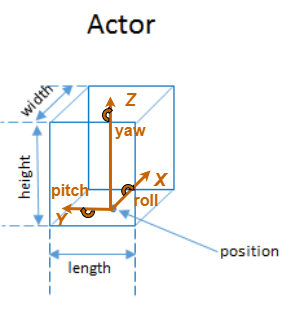
在驾驶场景中,一个演员是具有特定长度,宽度和高度的长方体(盒形)物体。Actors还具有在DBSM中指定的雷达横截面(RCS)模式,您可以通过设置角方位角和高度坐标来改进。演员的位置被定义为其底面的中心。该中心点用作演员的旋转中心,其与地面接触点,其原点在其本地坐标系中。在这个坐标系中:
这X- 从演员向前指向。
这y- 来自演员留下的轴点。
这Z.- 从地面上指出。
滚动,俯仰和偏航是顺时针正时,看向前的方向X- ,y-, 和Z.分别。
一种车辆是一个在车轮上移动的演员。车辆有三个额外的属性,用于控制前桥的放置。
轴距- 前轴和后轴之间的距离
前突出-车辆前部与前轴之间的距离
后突破- 后轴和车辆后部之间的距离
与其他类型的演员不同,车辆的位置由地面上的点限定,该点在其后轴的中心下方。该点对应于车辆的自然旋转中心。与非鬼演员一样,这一点是车辆本地坐标系中的起源,其中:
这X- 从车辆前进。
这y- 从车辆留下的轴。
这Z.- 从地面上指出。
滚动,俯仰和偏航是顺时针正时,看向前的方向X- ,y-, 和Z.分别。

此表显示了常见演员的列表及其尺寸。指定这些值演员和车辆对象,设置显示的相应属性。
| 演员的分类 | 演员对象 | 演员属性 | ||||||
|---|---|---|---|---|---|---|---|---|
长度 |
宽度 |
高度 |
前端 |
RearOverhang |
轴距 |
rcspattern. |
||
| 行人 | 演员 |
0.24米 | 0.45米 | 1.7米 | N / A. | N / A. | N / A. | -8 dbsm. |
| 车 | 车辆 |
4.7米 | 1.8米 | 1.4米 | 0.9米 | 1.0米 | 2.8米 | 10 dbsm. |
| 摩托车 | 车辆 |
2.2米 | 0.6米 | 1.5米 | 0.37米 | 0.32米 | 1.51米 | 0 dbsm. |
您还可以从以下列表中选择一个网站:
