鸟瞰的范围
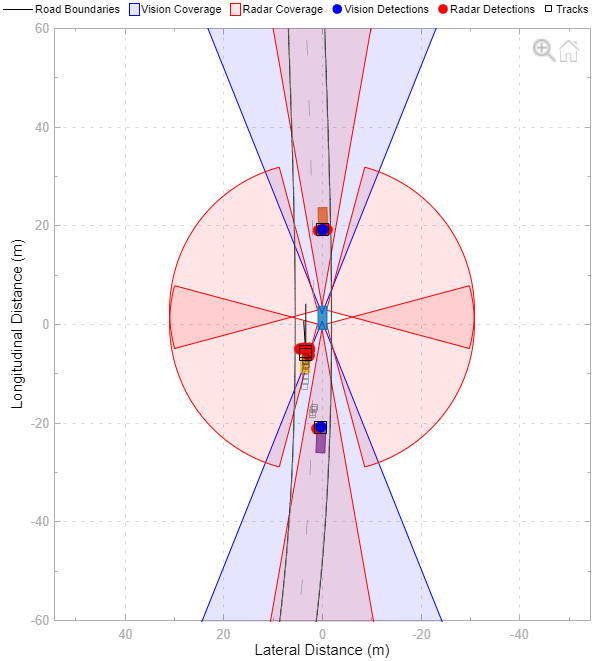
可视化传感器覆盖、探测和轨迹
描述
的鸟瞰的范围可以在Simulink中可视化驾驶场景的各个方面金宝app®模型。
使用范围,你可以:
检查雷达、视觉和激光雷达传感器的覆盖区域。
分析参与者、道路边界和车道边界的传感器检测。
分析场景中移动参与者的跟踪结果。
要开始,请打开作用域并单击找到信号.范围更新框图,查找代表驾驶场景各个方面的信号,将信号组织成组,并显示信号。然后,您可以在模拟信号时分析信号,将信号组织成新的组,并修改信号的图形显示。
有关使用作用域的详细信息,请参见在鸟瞰镜中可视化传感器数据和轨迹.
打开鸟瞰镜应用程序
金宝app仿真软件将来发布:
在模拟选项卡,在审查结果,点击鸟瞰的范围.
在应用程序选项卡,在信号处理和无线通信,点击鸟瞰的范围.
例子
相关的例子
参数
设置>车辆坐标视图纵轴的限制-纵轴极限
(-60年,60)(默认)| (最小值,马克斯)向量
纵轴限制,指定为[最小值,马克斯)向量。
可调:是的
横向轴的限制-横向轴限
(-30年,30)(默认)| (最小值,马克斯)向量
指定为[最小值,马克斯)向量。
可调:是的
跟踪位置选择器-选择矩阵,用于提取跟踪对象的位置
[1, 0, 0, 0, 0, 0;0, 0, 1, 0, 0, 0)(默认)| 2 -n0和1的矩阵
选择矩阵用来提取轨迹输出的位置多目标跟踪块。范围从轨道的状态向量中提取位置,这些状态向量存储在状态输出轨道结构的字段。如果您指定了错误的选择,那么范围将显示错误的轨道位置。
指定跟踪位置选择器2,n0和1的矩阵,其中n为跨越所有轨迹的状态向量的大小。这些状态向量包含位置、速度、加速度和被跟踪对象的其他状态信息。
默认选择矩阵从表单的三维恒定速度状态向量中选择轨迹位置[x, vx; y; v; z; vz].对于每个轨道,范围将选择矩阵乘以状态向量得到x-安置和y-position,如下图所示:
[1, 0, 0, 0, 0, 0;0,0,0,0,0] [x;vx;y;
对MATLAB®说明这个选择过程的代码示例,请参阅getTrackPositions功能和multiObjectTracker对象。
状态向量和相应选择矩阵的格式依赖于卡尔曼滤波多目标跟踪块用于跟踪对象。假设多目标跟踪块初始化为使用二维恒速线性卡尔曼滤波器,其中过滤器初始化函数名块的参数设置为initcvkf函数。对于这种类型的过滤器,跟踪状态是这样的[x, vx; y; v].要可视化此块输出的轨道位置,请设置跟踪位置选择器来[1, 0, 0, 0;0, 0, 1, 0].
可调:不
跟踪速度选择器-选择矩阵,用于提取跟踪对象的速度
[0, - 1, 0, 0, 0, 0;0, 0, 0, 1, 0, 0)(默认)| 2 -n0和1的矩阵
选择矩阵用于提取由轨道输出的速度多目标跟踪块。该范围从轨道的状态向量中提取速度,这些状态向量存储在状态输出轨道结构的字段。如果您指定了错误的选择,那么scope将显示错误的轨道速度。
指定跟踪速度选择器2,n0和1的矩阵,其中n为跨越所有轨迹的状态向量的大小。这些状态向量包含位置、速度、加速度和被跟踪对象的其他状态信息。
默认选择矩阵从表单的三维恒定速度状态向量中选择轨迹速度[x, vx; y; v; z; vz].对于每个轨道,范围将选择矩阵乘以状态向量,得到的轨道速度x方向,vx,y方向,v,如图所示:
[0, - 1, 0, 0, 0, 0;0,0,0, 0,0] * [x;vx;y;
有关说明这个选择过程的MATLAB代码示例,请参阅getTrackVelocities功能和multiObjectTracker对象。
状态向量和相应选择矩阵的格式依赖于卡尔曼滤波多目标跟踪块用于跟踪对象。假设多目标跟踪块初始化为使用二维恒速线性卡尔曼滤波器,其中过滤器初始化函数名块的参数设置为initcvkf函数。对于这种类型的过滤器,跟踪状态是这样的[x, vx; y; v].要可视化这个块输出的轨道速度,设置跟踪速度选择器来[0, - 1, 0, 0;0, 0, 0, 1].
可调:不
显示短信号名称—不显示路径信息,只显示信号名称
在(默认)|从
选择此参数表示短信号名称(不含路径信息的信号)。
清除此参数以显示长信号名称(带有路径信息的信号)。
考虑到信号VisionDetection在子系统传感器模拟.当您选择此参数时,短名称VisionDetection,显示。当您清除此参数时,长名称传感器模拟/ VisionDetection,显示。
可调:是的
α-覆盖范围的透明度
0.1(默认)|在[0,1]范围内的实标量
覆盖区域的透明度,指定为[0,1]范围内的实标量。0值使覆盖区域完全透明。值1使覆盖区域完全不透明。
属性中的信号只能使用此属性传感器覆盖组。
可调:是的
速度扩展-速度矢量大小长度的比例因子
1(默认)|在[0,20]范围内的实标量
速度矢量大小长度的比例因子,指定为范围[0,20]内的实标量。作用域将大小矢量值呈现为米×速度扩展,在那里米是速度的大小。
属性中的信号只能使用此属性检测或跟踪组。
可调:是的
限制
一般的局限性
不支持引用的模型。金宝app要可视化引用模型中的信号,请将这些信号的输出移动到顶层模型。
不支持快速加速模式。金宝app
不支持外部模式和从生成的可执行文件模拟模型。金宝app
如果在快速重启中初始化模型,那么在第一次模拟之后,找到信号按钮被禁用。要启用找到信号再次,调试选项卡,单击金宝app快速启动.
场景读取器块限制
的鸟瞰的范围不支持包含以下内容金宝app的模型中的可视化:
不止一个场景的读者块。
一个场景的读者块在非虚拟子系统(如原子子系统或启用子系统)内。
一个场景的读者块,配置为以世界坐标输出角色和车道边界(输出坐标系参数设置为
世界坐标).
为场景的读者块,在其中你使用自我的车辆输入端口,自我车辆信号必须直接连接到块。不支持从非虚拟子系统或参考模型输出的自我车辆信号的可视化。金宝app
3D模拟块限制
可视化的道路,小巷,和演员模拟3D场景配置块不受支持。金宝app如果你的代码块包含模拟3D场景配置块,鸟瞰的范围仍然显示自我车辆,但它有默认的车辆尺寸。
更多关于
车辆和世界坐标视图
在鸟瞰的范围,默认视图显示驾驶场景车辆坐标.在模拟过程中,此视图从ego vehicle的角度显示场景。使用这个视图来检查场景的各个方面,就在ego车辆的直接附近。

您还可以显示的驾驶场景世界坐标.在作用域工具条上,单击世界坐标打开世界坐标的观点窗口。使用此窗口可以查看整个场景。您还可以使用这个视图来检查不在自我载体的直接附近的行动者的轨迹。

显示区内的道路和车道世界坐标的观点,点击找到信号.要显示场景中的ego车辆和其他角色,请运行模拟。此视图不显示检测、轨迹、传感器覆盖区域和其他适用信号。这些信号只能在车辆坐标视图窗口。
请注意
在世界坐标的观点窗口,自我车辆周围的圆圈突出了车辆在场景中的位置。它不是传感器覆盖区域。
提示
要在模型中找到信号的来源,在范围的左边窗格中,右键单击一个信号并选择强调在模型.
您可以在模拟时显示或隐藏信号。例如,要隐藏传感器覆盖,首先从左边窗格中选择它。然后,从属性选项卡上,清晰的显示传感器的覆盖范围复选框。
在保存并关闭模型后重新打开作用域时,作用域画布最初是空白的。点击找到信号再次寻找信号。这些信号具有与您上次保存模型时相同的属性。
如果模拟运行得太快,您可以使用模拟节奏来降低它的速度。在模拟选项卡的Simulin金宝appk工具条,选择运行>模拟踱来踱去.然后,选择使节奏减慢模拟复选框,并将模拟时间减少到低于默认的每墙时钟秒一秒。
为了更好地检查场景,您可以在车辆坐标视图和世界坐标的观点窗户若要返回两个窗口的默认显示,请单击该窗口右上角的home按钮
 .
.
你也可以从以下列表中选择一个网站:
